1. Robotics SDK Introduction
1.1. Git Repository
1.2. User Guide Documentation
1.3. Overview
The Robotics SDK provides a robotics software development environment for TI Jacinto Processors. It also offers software building blocks and example demos that can be leveraged in robotics software development. The SDK runs in Docker container environments on:
In the next section, you will find detailed steps for setting up Docker container environments for ROS 2 Humble on the Processor SDK Linux for Edge AI. The Robotics SDK allows:
Optimized software implementation of computation-intensive software building blocks (including deep-learning, vision, perception, mapping and localization) on deep-learning core (C7x/MMA), DSP cores, hardware accelerators built-in on the processors.
Application software development on the target using libraries optimized on the TI Processor along with many open-source libraries and packages including, for example, OpenCV, Point-Cloud Library (PCL), and more.
Figure 1 shows the software libraries and components provided by the Robotics SDK.
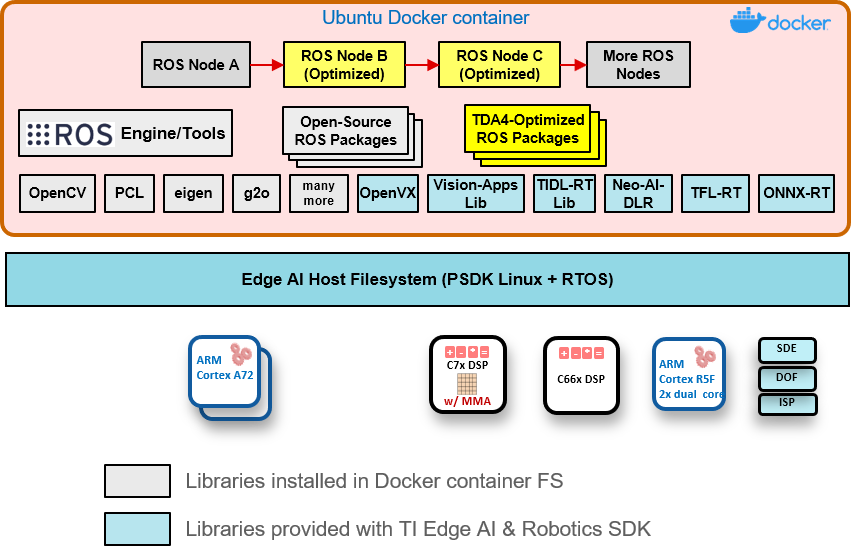
1.3.1. TI Vision Apps Library
The TI Vision Apps Library is included in the pre-built base image for the Processor SDK Linux for Edge AI. The library provides a set of APIs, including:
TI OpenVX kernels and software infrastructure
Imaging and vision applications
Perception applications
Advanced driver-assistance systems (ADAS) applications
1.3.2. Open-Source Deep-Learning Runtime
The Processor SDK Linux for Edge AI also supports the following open-source deep-learning runtime libraries:
TVM/Neo-AI-DLR
TFLite Runtime
ONNX Runtime
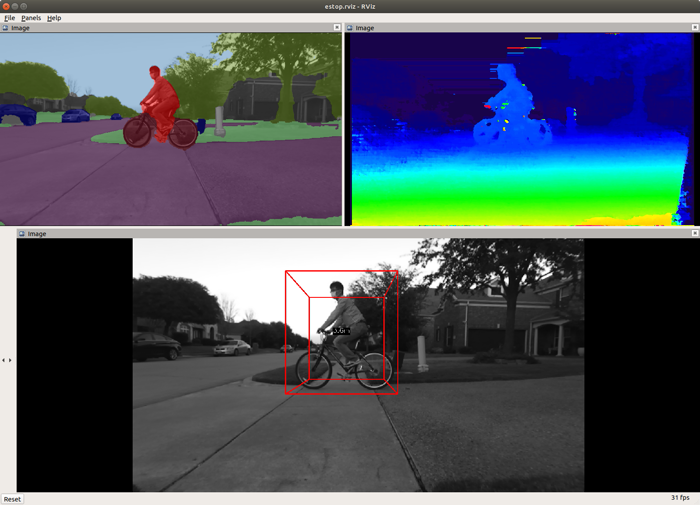
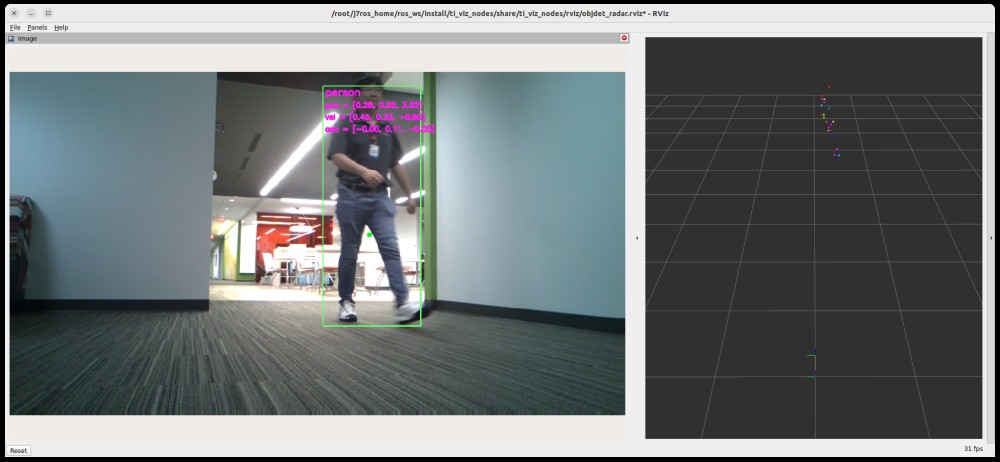
For more details on open-source deep-learning runtime on TI Processors, please check TI Edge AI Cloud. The Robotics SDK provides a versatile vision CNN node optimized for TI Processors that supports many deep-learning models for object detection, semantic segmentation, and 6D pose estimation operations.
Figure 2 shows a representative deep-learning and compute-intensive demo application developed with the Robotics SDK.

1.4. Setting Up Robotics SDK Docker Container Environment
This section describes how to set up the Robotics SDK on top of the Processor SDK Linux for Edge AI. To get started, please refer to our Setting Up Robotics SDK guide.
1.5. Sensor Driver Nodes
The following ROS nodes for cameras have been tested and are supported by the SDK:
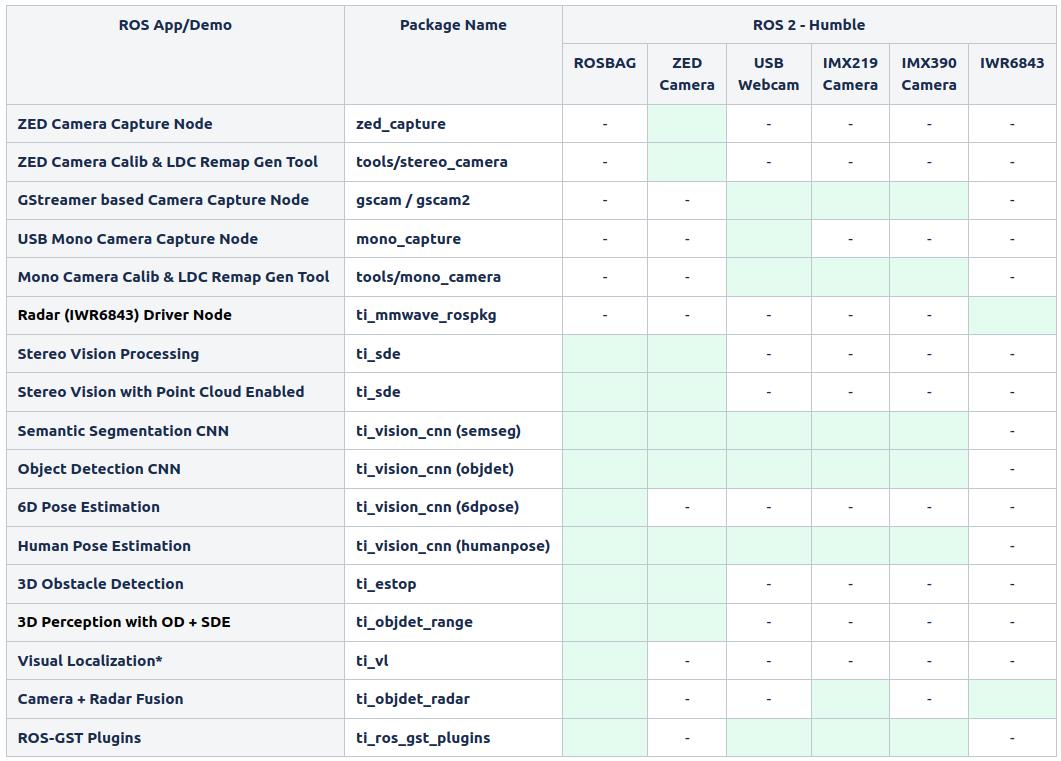
1.6. Demo Applications
The SDK supports the following out-of-box demo applications:
Visual Localization Accelerated on C7x/MMA (for TDA4VM, AM68A, and AM69A only)
1.8. Limitations and Known Issues
See known_issues.md for a list of limitations and known issues.
1.9. Change Log
See CHANGELOG.md for the change log.