10. 6D Pose Estimation
This ti_vision_cnn node is a versatile deep-learning (DL) inference ROS node that is optimized on DL cores and hardware accelerator of TI Processors. The ti_vision_cnn node supports compute-intensive DL inference operations, including 2D object detection, 6D Pose Estimation and semantic segmentation. Figure 1 shows the high-level block diagram of the applications around the ti_vision_cnn node, which consists of multiple processing blocks that are deployed on hardware accelerators and DSP processors for pre-processing and post-processing in an optimized manner.
10.1. System Description

For details of block diagram and parameters of ti_vision_cnn, please refer to README.md.
For details about the model for 6D pose estimation, please refer to YOLO-6D-Pose Multi-Object 6D Pose Estimation Model.
Note
cam_id and subdev_id for cameras: You can check the cam_id and subdev_id for the camera
attached to the SK board by running /opt/edgeai-gst-apps/scripts/setup_cameras.sh. Accordingly please update the parameters or pass as launch arguments.
10.2. Run the Application in ROS 2
[SK] To launch the 6D pose estimation demo with playing back a ROSBAG file, run the following command inside the Docker container on the the target SK board:
ros2 launch ti_vision_cnn bag_pose6D_cnn_launch.py
To process the image stream from a USB mono camera, depending on choice of resolution, run one from the following commands:
ros2 launch ti_vision_cnn gscam_pose6D_cnn_launch.py cam_id:=x width:=1280 height:=720
[Visualization on Ubuntu PC] For setting up environment of the remote PC, please follow Docker Setup for ROS 2
Depending on the resolution setting of the ROSBAG file, run the following command inside the Docker container on Ubuntu PC:
ros2 launch ti_viz_nodes rviz_pose6D_cnn_launch.py width:=1280 height:=960
Depending on the resolution setting of the capture node, run one from the following:
ros2 launch ti_viz_nodes rviz_pose6D_cnn_launch.py width:=1280 height:=720
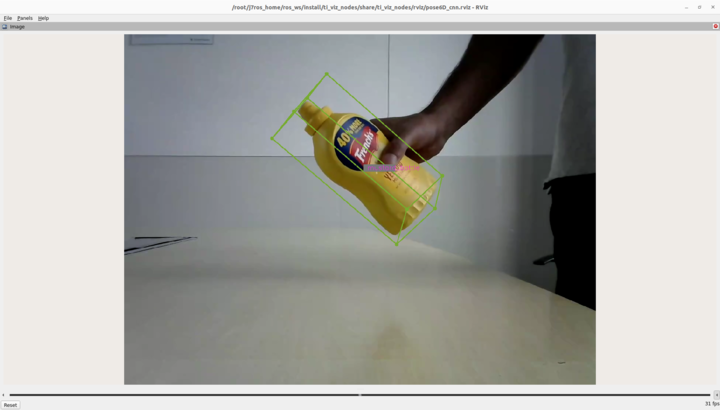
10.3. Known Issues
The default 6D pose estimation model is trained on a limited number of objects from the YCB dataset, with the mustard bottle being the sole object currently used for training. As a result, the accuracy of the model may be limited when it is used with different objects, with a different camera model, or in different scenarios.