5.2. CAN Module
5.2.1. Acronyms and Definitions
Abbreviation/Term |
Explanation |
|---|---|
AUTOSAR |
Automotive Open System Architecture |
RTE |
Runtime Environment |
BSW |
Basic Software |
GPIO |
General Purpose Input Output |
MCAL |
Micro Controller Abstraction Layer |
API |
Application Programming Interface |
DET |
Default Error Tracer |
HW |
Hardware |
SW |
Software |
I/O |
Input/Output |
CAN |
Controller Area Network |
CanIf |
Can Interface |
L-PDU |
Data Link Layer Protocol Data Unit. Consists of Identifier, Data Length and Data (SDU). |
DLC |
Data Length Code |
5.2.2. Introduction
This document details AUTOSAR BSW CAN module implementation
Supported AUTOSAR Release |
4.3.1 |
|---|---|
Supported Configuration Variants |
Post-build, Pre-Compile |
Vendor ID |
CAN_VENDOR_ID (44) |
Module ID |
CAN_MODULE_ID (80) |
The CAN driver provides services for basic transmission and reception of CAN frames in both interrupt and polling mode. These components can be used by an application.
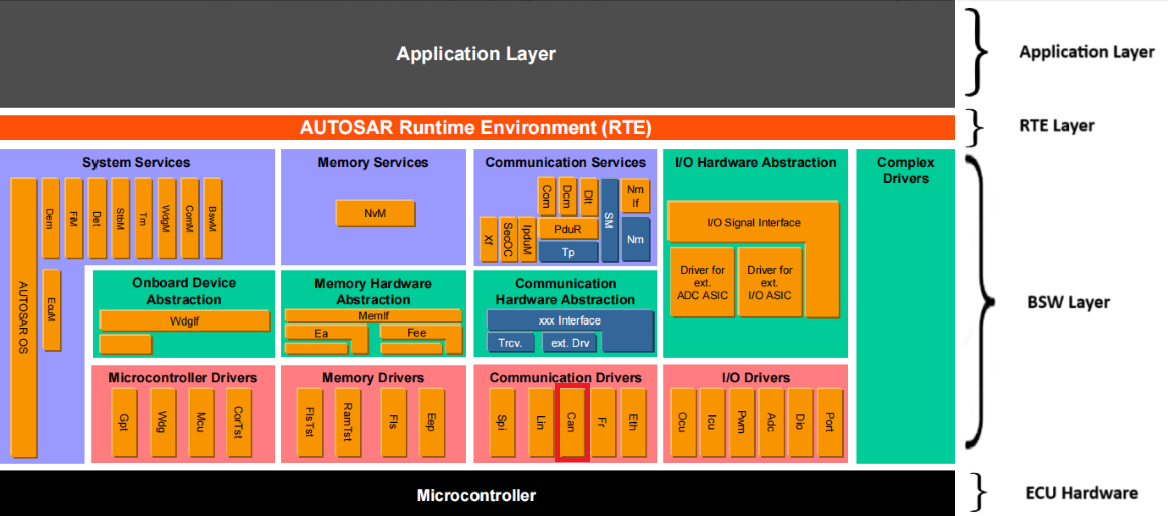
Fig. 5.2 Can MCAL AUTOSAR
5.2.3. Functional Overview
The CAN module initializes and controls the internal CAN Controllers of the microcontroller. It provides services to write, read, and configure mailboxes of the Can controllers
Programming of clock source for the can, is beyond the scope of this document. The driver expects user of this module has programmed required clock source.
Can module offers following services.
On L-PDU transmission, the Can module writes the L-PDU in an appropriate buffer inside the CAN controller hardware.
On L-PDU reception, the Can module calls the RX indication callback function with ID, DLC and pointer to L-SDU as parameter.
The Can module provides an interface that serves as periodical processing function, and which must be called by the Basic Software Scheduler module periodically.
The Can module provides services to control the state of the CAN controllers. Bus-off and Wake-up events are notified by means of callback functions.
5.2.4. Hardware Features
5.2.4.1. Hardware Features supported
Conforms with CAN Protocol 2.0 A, B and ISO 11898-1:2015
Full CAN FD support (up to 64 data bytes)
1-Mbps nominal bit rate, 5-Mbps data bit rate
Loop-back mode for self-test
AUTOSAR and SAE J1939 support
Maskable interrupt (two configurable interrupt lines and clock stop or wakeup)
Two clock domains (CAN clock and host clock)
Clock stop and wakeup support
Up to 32 dedicated transmit buffers
Configurable transmit FIFO, up to 32 elements
Configurable transmit queue, up to 32 elements
Configurable transmit Event FIFO, up to 32 elements
Up to 64 dedicated receive buffers
Two configurable receive FIFOs, up to 64 elements each
Up to 128 filter elements
5.2.4.2. Not supported Features
None
5.2.4.3. Non compliance
Below AUTOSAR requirement are not supported for Can Driver :
[SWS_Can_00447 ,SWS_Can_00446, SWS_Can_00445, SWS_Can_00391, SWS_Can_00244, SWS_Can_00242]
Rejection Reason : Currently Can driver using internal Can controller, so implementation of wakeup events through external hardware Can controller not required.
[SWS_Can_00405 ,SWS_Can_00290, SWS_Can_00267, SWS_Can_00404, SWS_Can_00258]
Rejection Reason : Can driver supports SLEEP and WAKEUP functionality, implementation of logical SLEEP state not required.
For more details, Refer AUTOSAR_SWS_CanDriver : Section: 5.1.2 : Header File Structure
5.2.5. Source files
📦f29h85x_mcal
┣ 📂build
┣ 📂docs
┣ 📂drivers
┃ ┣ 📂BSW_Stubs
┃ ┣ 📂Can
┃ ┃ ┣ 📂include
┃ ┃ ┃ ┣ 📜Can.h : Contains the API’s of the Can driver to be used by upper layers.
┃ ┃ ┃ ┣ 📜Can_Priv.h : Contains data structures and Internal function declarations.
┃ ┃ ┃ ┗ 📜Can_Reg_Access.h : Contains the MACROs for CAN register access.
┃ ┃ ┣ 📂src
┃ ┃ ┃ ┣ 📜Can.c : Contains the implementation of the API’s for Can driver.
┃ ┃ ┃ ┣ 📜Can_Irq.c : contains the implementation for Can interrupts handlers.
┃ ┃ ┃ ┗ 📜Can_Priv.c : Contains Functions that support the API’s for Can driver
┃ ┃ ┗ 📜CMakeLists.txt
┃ ┣ 📂Dio
┃ ┣ 📂Gpt
┃ ┣ 📂hw_include
┃ ┣ 📂Mcal_Lib
┃ ┣ 📂Mcu
┃ ┗ 📂Port
┣ 📂examples
┣ 📂plugins
┣ 📜CMakeLists.txt
┗ 📜CMakePresets.json

Fig. 5.3 Can Header File Structure
5.2.6. Module requirements
5.2.6.1. Memory Mapping
The driver follows the AUTOSAR memory mapping strategy. All memory sections should be stored in memory as per AUTOSAR specifications, considering initialization policy, alignment requirements, safety classification, and core scope where applicable.
Reference memory map files can be found at:
{MCAL_INSTALL_PATH}\drivers\BSW_Stubs\MemMap\include
The memory sections are organized according to AUTOSAR specifications to ensure proper placement of code and data in different memory regions based on their usage and access patterns.
5.2.6.2. Scheduling
Schedule Function API |
Description |
|---|---|
Can_MainFunction_Write |
This function performs the polling of TX confirmation when CAN_TX_PROCESSING is set to POLLING |
Can_MainFunction_Read |
This function performs the polling of RX indications when CAN_RX_PROCESSING is set to POLLING. |
Can_MainFunction_BusOff |
This function performs the polling of bus-off events that are configured statically as ‘to be polled’. |
Can_MainFunction_Wakeup |
This function performs the polling of wake-up events that are configured statically as ‘to be polled’. |
Can_MainFunction_Mode |
This function performs the polling of CAN controller mode transitions. |
5.2.6.3. Error handling
5.2.6.3.1. Development Error Reporting
Development errors are reported to the DET using the service Det_ReportError(),when enabled. The driver interface contains the MACRO declaration of the error codes to be returned.
5.2.6.4. Error codes
Type of Error |
Related Error code |
Value (Hex) |
|---|---|---|
API service called with wrong parameter pointer |
CAN_E_PARAM_POINTER |
0x01 |
API service called with wrong hardware handle |
CAN_E_PARAM_HANDLE |
0x02 |
API service called with wrong data length |
CAN_E_PARAM_DATA_LENGTH |
0x03 |
API service called with wrong parameter Controller |
CAN_E_PARAM_CONTROLLER |
0x04 |
API service used without initialization |
CAN_E_UNINIT |
0x05 |
Invalid transition for the current mode. |
CAN_E_TRANSITION |
0x06 |
Parameter baud rate has an invalid value. |
CAN_E_PARAM_BAUDRATE |
0x07 |
invalid ICOM configuration Id |
CAN_E_ICOM_CONFIG_INVALID |
0x08 |
Invalid Configuration set selection. |
CAN_E_INIT_FAILED |
0x09 |
5.2.7. Safety Mechanism
TI Diagnostic Unique Identifier |
Summary |
Description |
|---|---|---|
MCAN3 |
Periodic Software Read Back of Static Configuration Registers |
API is provided for the reading the static configuration registers |
MCAN8 |
SRAM ECC |
Provided the enable/disable the ECC mechanism through configuration |
MCAN10 |
MCAN Stuff Error Detection |
Errors will be reported to DEM module |
MCAN11 |
MCAN Form Error Detection |
Errors will be reported to DEM module |
MCAN12 |
MCAN Acknowledge Error Detection |
Errors will be reported to DEM module |
MCAN13 |
Bit Error Detection |
Errors will be reported to DEM module |
MCAN14 |
CRC in Message |
Errors will be reported to DEM module |
MCAN16 |
Timeout on FIFO activity |
Errors will be reported to DEM module |
MCAN19 |
Interrupt on Message RAM Access Failure |
Errors will be reported to DEM module |
MCAN21 |
Test of FEVT using ESM |
Provided selection of filter event pin via configuration |
Note
More details of Safety Mechanisms can be found in Safety Manual.
5.2.8. Silicon errata workarounds and recommendation
For detailed silicon errata, please check the latest Errata at https://www.ti.com/product/F29H859TU-Q1.
Advisory |
Revisions Affected |
Workaround in MCAL driver |
Recommended actions for user |
|---|---|---|---|
Message Order Inversion When Transmitting From Dedicated Tx Buffers Configured With Same Message ID |
0, A, B, C |
No workaround is implemented in the CAN driver. The message ID configuration and transmission request scheduling are runtime-dynamic and cannot be controlled at the driver level to enforce ordering. |
Use Tx FIFO mode instead of dedicated Tx Buffers when transmitting multiple messages with the same Message ID. The Tx FIFO ensures messages are transmitted in the order they are requested, preventing message order inversion. To configure Tx FIFO, set the |
5.2.9. Used resources
5.2.9.1. Interrupt Handling
AUTOSAR_SWS_CANDriver section: 10 Configuration specification, details the expected behavior and control flow for ISR implementation, please refer the same.
The Driver doesn’t register any interrupts handler (ISR), it’s expected that consumer of this driver registers the required interrupt handler.
For every CAN Instance, an ISR requires to be registered. The Interrupt number associated with instance of the CAN is detailed in TRM (also, please refer the Example application). Interrupt type should be selected in CAN plugin.
Can Instance |
Interrupt Name |
Interrupt handler |
|---|---|---|
MCANA |
MCANA_INT0 |
Can_A_Int0ISR |
MCANA |
MCANA_INT1 |
Can_A_Int1ISR |
MCANA |
MCANA_WAKE_AND_TS_PLS_INT |
Can_A_WakeUpISR |
MCANB |
MCANB_INT0 |
Can_B_Int0ISR |
MCANB |
MCANB_INT1 |
Can_B_Int1ISR |
MCANB |
MCANB_WAKE_AND_TS_PLS_INT |
Can_B_WakeUpISR |
MCANC |
MCANC_INT0 |
Can_C_Int0ISR |
MCANC |
MCANC_INT1 |
Can_C_Int1ISR |
MCANC |
MCANC_WAKE_AND_TS_PLS_INT |
Can_C_WakeUpISR |
MCAND |
MCAND_INT0 |
Can_D_Int0ISR |
MCAND |
MCAND_INT1 |
Can_D_Int1ISR |
MCAND |
MCAND_WAKE_AND_TS_PLS_INT |
Can_D_WakeUpISR |
MCANE |
MCANE_INT0 |
Can_E_Int0ISR |
MCANE |
MCANE_INT1 |
Can_E_Int1ISR |
MCANE |
MCANE_WAKE_AND_TS_PLS_INT |
Can_E_WakeUpISR |
MCANF |
MCANF_INT0 |
Can_F_Int0ISR |
MCANF |
MCANF_INT1 |
Can_F_Int1ISR |
MCANF |
MCANF_WAKE_AND_TS_PLS_INT |
Can_F_WakeUpISR |
Note
Same interrupt category should be configured in Os module. Nesting of CAN interrupts is not allowed. In case nesting of CAN interrupt is enabled, data integrity cannot be ensured.
5.2.9.2. Instance support
CPU instances |
supported |
|---|---|
CPU 1 |
YES |
CPU 2 |
NO |
CPU 3 |
NO |
5.2.9.3. Hardware-Software Mapping
Below image shows CAN driver Hardware-Software mapping. For more information related to HW/SW mapping, refer the F29x Reference Manual.
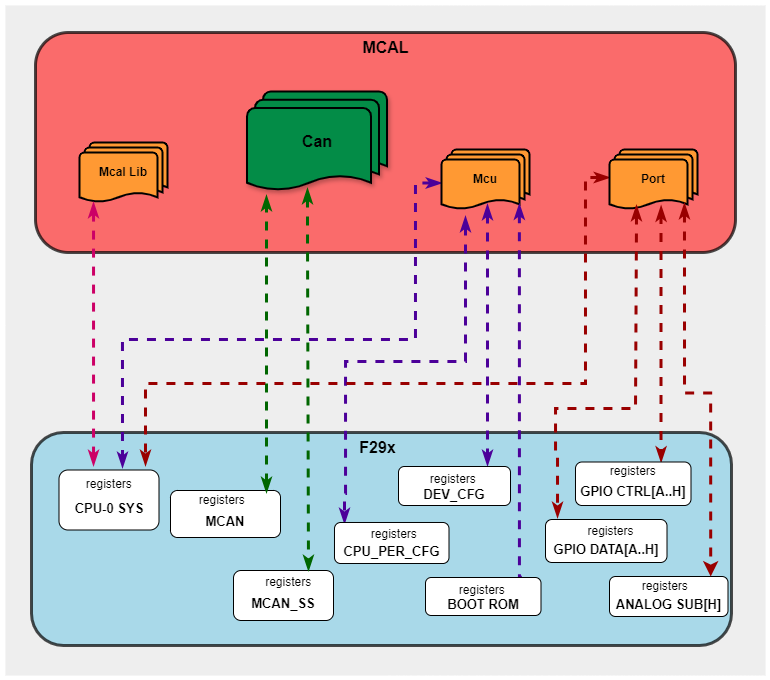
Fig. 5.4 Can HW/SW Mapping
5.2.10. Integration description
5.2.10.1. Dependent modules
5.2.10.1.1. DET
This implementation depends on the DET in order to report development errors The detection of development errors is configurable (ON / OFF), The switch CAN_CFG_DEV_ERROR_DETECT will activate or deactivate the detection of all development errors..
5.2.10.1.2. SchM
If multiple AUTOSAR runnables have access to the same Data Store Memory block, the exported AUTOSAR specification enforces data consistency by using an AUTOSAR exclusive area. With this specification, the runnables have mutually exclusive access to the per-instance memory global data, which prevents data corruption. Beside the OS, the BSW Scheduler provides functions that CAN module calls at begin and end of critical sections. This implementation requires 1 level of exclusive access to guard critical sections.
The data consistency mechanism that has to be applied to an ExclusiveArea might be domain, ECU or even project specific. The decision which mechanism has to be applied by RTE / Basic Software Scheduler is taken during ECU integration by setting the Exclusive Area configuration parameter RteExclusiveAreaImplMechanism. This parameter is an input for RTE generator. For CAN Module, data consistency and exclusive access to critical sections are required for the following sections as shown in the table below:
Exclusive Area Functions used |
CAN Function calling Exclusive Area |
Need for Exclusive Area |
Recommended Exclusive Area Mapping |
|---|---|---|---|
CAN_EXCLUSIVE_AREA_0 |
Can_DisableControllerInterrupts |
To protect against multiple access for shared resources, i.e. Can interrupt Registers, which can lead to race condition |
ALL_INTERRUPT_BLOCKING : All interrupts should be blocked as this API’s can be called in the interrupts |
CAN_EXCLUSIVE_AREA_1 |
Can_Write |
To protect again multiple access to the same hth handle in the Can_write API |
OS_RESOURCE : If the Can_Write API is only called from pre-emptible task context, its recommended to use this mechanism as it takes care of resource access protection and task priority management. |
5.2.10.1.3. MCU
MCU Module is required to initialize all the clock to be used by different peripherals
5.2.10.1.4. PORT
PORT Module is required to initialize Pin configurations and MUX mode for CAN Instances
5.2.10.2. Resource Allocator
The CAN module uses the Resource Allocator to allocate CAN peripheral instances to CPU cores and configure their memory-mapped base addresses. Each allocation is placed inside a Context that maps to a CPU core (e.g. CPU1). The CurrentContext parameter in the Resource Allocator selects which Context is active for MCAL execution. See the Resource Allocator Module User Guide for details on configuring device-specific settings.
The Frame parameter (FRAME0–FRAME3) selects the memory-mapped frame for the instance, enabling simultaneous access from different initiators without arbitration stalls. The BaseAddr is auto-calculated based on the selected instance and frame. The DebugHaltEnabled and StandbyModeEnabled parameters control peripheral behaviour during CPU debug halt and standby low-power modes respectively.
5.2.10.2.1. Resource Allocator Usage Example
To allocate MCANA to CPU1 using FRAME0:
In the Resource Allocator configuration, create a new Can instance allocation under the CPU1 Context
Set InstanceName to
MCANASet Frame to
FRAME0The BaseAddr will be automatically calculated as
MCANA_DRIVER_BASE_FRAME(0U)Optionally configure DebugHaltEnabled and StandbyModeEnabled
Resource Allocator Configuration:
├── Context (Core: CPU1)
│ └── CanInstanceAllocation
│ ├── InstanceName: MCANA
│ ├── Frame: FRAME0
│ ├── BaseAddr: MCANA_DRIVER_BASE_FRAME(0U) [auto-calculated]
│ ├── DebugHaltEnabled: true
│ └── StandbyModeEnabled: true
5.2.10.3. General Guidelines
5.2.10.3.1. Imported Types: Can_HwHandleType
Can_HwHandleType represents the hardware object handles of a CAN hardware unit. MCAN supports configuration of more than 256 hardware object handles. Hence extended range (i.e. uint16 type) must be used. For details of Can_HwHandleType refer AUTOSAR requirement SWS_Can_00429.
5.2.11. Configuration
The Can Driver implementation supports multiple configuration variants The driver expects generated Can_Cfg.h to be present as input file. The associated Can driver configuration generated source files are Can_Cfg.c and Can_PBcfg.c if Post-Build config variant is selected, only Can_Cfg.c if Pre-Compile variant is selected
The generated configuration files should not be modified manually. The config tool Elektrobit Tresos should be used to modify the configuration files.
5.2.11.1. Configuration Parameters
5.2.11.1.1. CanConfigSet
This container contains the configuration parameters and sub containers of the AUTOSAR Can module.
5.2.11.1.1.1. CanController
This container contains the configuration parameters of the CAN controller(s).
5.2.11.1.1.2. CanBusoffProcessing
Item |
|
|---|---|
Name |
CanBusoffProcessing |
Description |
Enables / disables API Can_MainFunction_BusOff() for handling busoff events in polling mode. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
POLLING |
Range |
INTERRUPT |
5.2.11.1.1.3. CanControllerActivation
Item |
|
|---|---|
Name |
CanControllerActivation |
Description |
Defines if a CAN controller is used in the configuration. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
true |
5.2.11.1.1.4. CanControllerBaseAddress
Item |
|
|---|---|
Name |
CanControllerBaseAddress |
Description |
Specifies the CAN controller base address. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
MCANA_DRIVER_BASE_FRAME(0) |
5.2.11.1.1.5. CanControllerId
Item |
|
|---|---|
Name |
CanControllerId |
Description |
This parameter provides the controller ID which is unique in a given CAN Driver. The value for this parameter starts with 0 and continue without any gaps. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.1.6. CanRxProcessing
Item |
|
|---|---|
Name |
CanRxProcessing |
Description |
Enables / disables API Can_MainFunction_Read() for handling PDU reception events in polling mode. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
POLLING |
Range |
INTERRUPT |
5.2.11.1.1.7. CanTxProcessing
Item |
|
|---|---|
Name |
CanTxProcessing |
Description |
Enables / disables API Can_MainFunction_Write() for handling PDU transmission events in polling mode. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
POLLING |
Range |
INTERRUPT |
5.2.11.1.1.8. CanWakeupFunctionalityAPI
Item |
|
|---|---|
Name |
CanWakeupFunctionalityAPI |
Description |
Adds / removes the service Can_CheckWakeup() from the code. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.9. CanWakeupProcessing
Item |
|
|---|---|
Name |
CanWakeupProcessing |
Description |
Enables / disables API Can_MainFunction_Wakeup() for handling wakeup events in polling mode. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
POLLING |
Range |
INTERRUPT |
5.2.11.1.1.10. CanWakeupSupport
Item |
|
|---|---|
Name |
CanWakeupSupport |
Description |
CAN driver support for wakeup over CAN Bus. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.11. CanInteruptType
Item |
|
|---|---|
Name |
CanInteruptType |
Description |
Defines the interrupt type. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_ISR_CAT1_RTINT |
Range |
CAN_ISR_CAT1_RTINT |
5.2.11.1.1.12. CanControllerInstance
Item |
|
|---|---|
Name |
CanControllerInstance |
Description |
Reference to the CAN Controller Instance. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.1.13. CanControllerDefaultBaudrate
Item |
|
|---|---|
Name |
CanControllerDefaultBaudrate |
Description |
Reference to baudrate configuration container configured for the Can Controller. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.1.14. CanCpuClockRef
Item |
|
|---|---|
Name |
CanCpuClockRef |
Description |
Reference to the CPU clock configuration, which is set in the MCU driver configuration. This parameter refers to MCAN Bit Clock.[MCAN_FCLK] |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.1.15. CanWakeupSourceRef
Item |
|
|---|---|
Name |
CanWakeupSourceRef |
Description |
This parameter contains a reference to the Wakeup Source for this controller as defined in the ECU State Manager. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.1.16. CanControllerConfig
This container contains CAN Controller specific configuration parameters.
5.2.11.1.1.17. CanFDMode
Item |
|
|---|---|
Name |
CanFDMode |
Description |
Enable Flexible Datarate Operation. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.18. CanLoopbackMode
Item |
|
|---|---|
Name |
CanLoopbackMode |
Description |
Enable internal loopback mode. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.19. CanTransmitPause
Item |
|
|---|---|
Name |
CanTransmitPause |
Description |
Enable Transmit Pause. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.20. CanDisableAutomaticRetransmission
Item |
|
|---|---|
Name |
CanDisableAutomaticRetransmission |
Description |
Disable automatic retranmission on transmit errors. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.21. CanExtendedIDMask
Item |
|
|---|---|
Name |
CanExtendedIDMask |
Description |
Defines the value of Extended ID and Mask. Applied globally to all extended ID range filters (EFT=00) on this controller |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
Texas Instruments |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
536870911 |
Max-value |
536870911 |
Min-value |
0 |
5.2.11.1.1.22. CanControllerBaudrateConfig
This container contains bit timing related configuration parameters of the CAN controller(s).
5.2.11.1.1.23. CanControllerBaudRate
Item |
|
|---|---|
Name |
CanControllerBaudRate |
Description |
Specifies the baudrate of the controller in kbps. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1000 |
Max-value |
1000 |
Min-value |
0 |
5.2.11.1.1.24. CanControllerBaudRateConfigID
Item |
|
|---|---|
Name |
CanControllerBaudRateConfigID |
Description |
Uniquely identifies a specific baud rate configuration. This ID is used by SetBaudrate API. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
65535 |
Min-value |
0 |
5.2.11.1.1.25. CanControllerPropSeg
Item |
|
|---|---|
Name |
CanControllerPropSeg |
Description |
Specifies propagation delay in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
2 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.1.26. CanControllerSeg1
Item |
|
|---|---|
Name |
CanControllerSeg1 |
Description |
Specifies phase segment 1 in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
3 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.1.27. CanControllerSeg2
Item |
|
|---|---|
Name |
CanControllerSeg2 |
Description |
Specifies phase segment 2 in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
4 |
Max-value |
128 |
Min-value |
2 |
5.2.11.1.1.28. CanControllerSyncJumpWidth
Item |
|
|---|---|
Name |
CanControllerSyncJumpWidth |
Description |
Specifies the synchronization jump width for the controller in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
4 |
Max-value |
128 |
Min-value |
1 |
5.2.11.1.1.29. CanControllerFdBaudrateConfig
This optional container contains bit timing related configuration parameters of the CAN controller(s) for payload and CRC of a CAN FD frame. If this container exists the controller supports CAN FD frames.
5.2.11.1.1.30. CanControllerFdBaudRate
Item |
|
|---|---|
Name |
CanControllerFdBaudRate |
Description |
Specifies the data segment baud rate of the controller in kbps. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1000 |
Max-value |
5000 |
Min-value |
0 |
5.2.11.1.1.31. CanControllerPropSeg
Item |
|
|---|---|
Name |
CanControllerPropSeg |
Description |
Specifies propagation delay in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
2 |
Max-value |
32 |
Min-value |
0 |
5.2.11.1.1.32. CanControllerSeg1
Item |
|
|---|---|
Name |
CanControllerSeg1 |
Description |
Specifies phase segment 1 in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
3 |
Max-value |
32 |
Min-value |
0 |
5.2.11.1.1.33. CanControllerSeg2
Item |
|
|---|---|
Name |
CanControllerSeg2 |
Description |
Specifies phase segment 2 in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
4 |
Max-value |
16 |
Min-value |
1 |
5.2.11.1.1.34. CanControllerSyncJumpWidth
Item |
|
|---|---|
Name |
CanControllerSyncJumpWidth |
Description |
Specifies the synchronization jump width for the controller in time quantas. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
4 |
Max-value |
16 |
Min-value |
1 |
5.2.11.1.1.35. CanControllerTrcvDelayCompensationOffset
Item |
|
|---|---|
Name |
CanControllerTrcvDelayCompensationOffset |
Description |
Specifies the Transceiver Delay Compensation Offset in ns. If not specified Transceiver Delay Compensation is disabled. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
true |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
400 |
Min-value |
0 |
5.2.11.1.1.36. CanControllerTrcvDelayCompensationFilter
Item |
|
|---|---|
Name |
CanControllerTrcvDelayCompensationFilter |
Description |
Specifies the Transceiver Delay Compensation Filter in ns. If not specified Transceiver Delay Compensation is disabled. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
400 |
Min-value |
0 |
5.2.11.1.1.37. CanControllerTxBitRateSwitch
Item |
|
|---|---|
Name |
CanControllerTxBitRateSwitch |
Description |
Specifies if the bit rate switching shall be used for transmissions. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
true |
5.2.11.1.1.38. CanTTController
CanTTController is specified in the SWS TTCAN and contains the configuration parameters of the TTCAN controller(s) (which are needed in addition to the configuration parameters of the CAN controller(s)).
5.2.11.1.1.39. CanTTControllerApplWatchdogLimit
Item |
|
|---|---|
Name |
CanTTControllerApplWatchdogLimit |
Description |
Defines the maximum time period (unit is 256 times NTU) after which the application has to serve the watchdog. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.1.40. CanTTControllerCycleCountMax
Item |
|
|---|---|
Name |
CanTTControllerCycleCountMax |
Description |
Defines the value for cycle_count_max. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
63 |
Min-value |
0 |
5.2.11.1.1.41. CanTTControllerExpectedTxTrigger
Item |
|
|---|---|
Name |
CanTTControllerExpectedTxTrigger |
Description |
Number of expected_tx_trigger. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.1.42. CanTTControllerExternalClockSynchronisation
Item |
|
|---|---|
Name |
CanTTControllerExternalClockSynchronisation |
Description |
Enables/disables the external clock synchronization. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.43. CanTTControllerGlobalTimeFiltering
Item |
|
|---|---|
Name |
CanTTControllerGlobalTimeFiltering |
Description |
Enables/disables the global time filtering. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.44. CanTTControllerInitialRefOffset
Item |
|
|---|---|
Name |
CanTTControllerInitialRefOffset |
Description |
Defines the initial value for ref trigger offset. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
127 |
Min-value |
0 |
5.2.11.1.1.45. CanTTControllerInterruptEnable
Item |
|
|---|---|
Name |
CanTTControllerInterruptEnable |
Description |
Enables/disables the respective interrupts. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
1023 |
Min-value |
0 |
5.2.11.1.1.46. CanTTControllerLevel2
Item |
|
|---|---|
Name |
CanTTControllerLevel2 |
Description |
Defines whether Level 2 or Level 1 is used. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.47. CanTTControllerNTUConfig
Item |
|
|---|---|
Name |
CanTTControllerNTUConfig |
Description |
Defines the config value for NTU (network time unit). |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.0 |
Max-value |
100.0 |
Min-value |
0.0 |
5.2.11.1.1.48. CanTTControllerOperationMode
Item |
|
|---|---|
Name |
CanTTControllerOperationMode |
Description |
Defines the operation mode. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_TT_EVENT_SYNC_TIME_TRIGGERED |
Range |
CAN_TT_EVENT_SYNC_TIME_TRIGGERED |
5.2.11.1.1.49. CanTTControllerSyncDeviation
Item |
|
|---|---|
Name |
CanTTControllerSyncDeviation |
Description |
Defines the maximum synchronization deviation: |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.0 |
Max-value |
100.0 |
Min-value |
0.0 |
5.2.11.1.1.50. CanTTControllerTimeMaster
Item |
|
|---|---|
Name |
CanTTControllerTimeMaster |
Description |
Defines whether the controller acts as a potential time master. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.51. CanTTControllerTimeMasterPriority
Item |
|
|---|---|
Name |
CanTTControllerTimeMasterPriority |
Description |
Defines the time master priority. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
7 |
Min-value |
0 |
5.2.11.1.1.52. CanTTControllerTURRestore
Item |
|
|---|---|
Name |
CanTTControllerTURRestore |
Description |
Enables/disables the TUR restore. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.53. CanTTControllerTxEnableWindowLength
Item |
|
|---|---|
Name |
CanTTControllerTxEnableWindowLength |
Description |
Length of the tx enable window given in CAN bit times. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1 |
Max-value |
16 |
Min-value |
1 |
5.2.11.1.1.54. CanTTControllerWatchTriggerGapTimeMark
Item |
|
|---|---|
Name |
CanTTControllerWatchTriggerGapTimeMark |
Description |
watch trigger time mark after a gap |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
65535 |
Min-value |
0 |
5.2.11.1.1.55. CanTTControllerWatchTriggerTimeMark
Item |
|
|---|---|
Name |
CanTTControllerWatchTriggerTimeMark |
Description |
watch trigger time mark |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
65535 |
Min-value |
0 |
5.2.11.1.1.56. CanTTIRQProcessing
Item |
|
|---|---|
Name |
CanTTIRQProcessing |
Description |
Enables / disables API Can_MainFunction_BusOff() for handling busoff events in polling mode. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
POLLING |
Range |
INTERRUPT |
5.2.11.1.1.57. CanHardwareObject
This container contains the configuration (parameters) of CAN Hardware Objects.
5.2.11.1.1.58. CanFdPaddingValue
Item |
|
|---|---|
Name |
CanFdPaddingValue |
Description |
Specifies the value which is used to pad unspecified data in CAN FD frames > 8 bytes for transmission. This is necessary due to the discrete possible values of the DLC if > 8 bytes. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.1.59. CanHandleType
Item |
|
|---|---|
Name |
CanHandleType |
Description |
Specifies the type (Full-CAN or Basic-CAN) of a hardware object. Basic object uses FIFO in hardware and Full object uses dedicated buffer in hardware. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
BASIC |
Range |
BASIC |
5.2.11.1.1.60. CanHardwareObjectUsesPolling
Item |
|
|---|---|
Name |
CanHardwareObjectUsesPolling |
Description |
Enables polling of this hardware object. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.61. CanHwObjectCount
Item |
|
|---|---|
Name |
CanHwObjectCount |
Description |
Number of hardware objects used to implement one HOH. In case of Basic object, this parameter defines the depth of FIFO. In case of Full object it must be one. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1 |
Max-value |
65535 |
Min-value |
1 |
5.2.11.1.1.62. CanIdType
Item |
|
|---|---|
Name |
CanIdType |
Description |
Specifies whether the IdValue is of type |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
MIXED |
Range |
EXTENDED |
5.2.11.1.1.63. CanObjectId
Item |
|
|---|---|
Name |
CanObjectId |
Description |
Holds the handle ID of HRH or HTH. The value of this parameter is unique in a given CAN Driver, and it should start with 0 and continue without any gaps. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
65535 |
Min-value |
0 |
5.2.11.1.1.64. CanObjectType
Item |
|
|---|---|
Name |
CanObjectType |
Description |
Specifies if the HardwareObject is used as Transmit or as Receive object |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
TRANSMIT |
Range |
RECEIVE |
5.2.11.1.1.65. CanTriggerTransmitEnable
Item |
|
|---|---|
Name |
CanTriggerTransmitEnable |
Description |
This parameter defines if or if not Can supports the trigger-transmit API for this handle. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.66. CanControllerRef
Item |
|
|---|---|
Name |
CanControllerRef |
Description |
Reference to CAN Controller to which the HOH is associated to. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.1.67. CanMainFunctionRWPeriodRef
Item |
|
|---|---|
Name |
CanMainFunctionRWPeriodRef |
Description |
Reference to CanMainFunctionPeriod. This reference is required when the associated CanController uses POLLING or MIXED mode for CanRxProcessing (for RECEIVE objects) or CanTxProcessing (for TRANSMIT objects). |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
true |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.1.68. CanHwFilter
This container is only valid for HRHs and contains the configuration (parameters) of one hardware filter.
5.2.11.1.1.69. CanHwFilterCode
Item |
|
|---|---|
Name |
CanHwFilterCode |
Description |
Specifies (together with the filter mask) the identifiers range that passes the hardware filter. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
4294967295 |
Min-value |
0 |
5.2.11.1.1.70. CanHwFilterMask
Item |
|
|---|---|
Name |
CanHwFilterMask |
Description |
Describes a mask for hardware-based filtering of CAN identifiers. The CAN identifiers of incoming messages are masked with the appropriate CanFilterMaskValue. Bits holding a 0 mean don’t care, i.e. do not compare the message’s identifier in the respective bit position. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
4294967295 |
Min-value |
0 |
5.2.11.1.1.71. CanStandardFilterType
Item |
|
|---|---|
Name |
CanStandardFilterType |
Description |
Defines the type of the Hardware Filter. This parameter applies to both Standard Filter Type (SFT) and Extended Filter Type (EFT). Refer TRM section ‘Standard Message ID Filter Element’ and ‘Extended Message ID Filter Element’ for more details. For Standard filter:
For Extended filter:
|
Origin |
Texas Instruments |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_CLASSIC_FILTER |
Range |
CAN_RANGE_FILTER |
5.2.11.1.1.72. CanEventPin
Item |
|
|---|---|
Name |
CanEventPin |
Description |
Defines the type of the Event pin |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_EVENT_PIN_NONE |
Range |
CAN_EVENT_PIN_0 |
5.2.11.1.1.73. CanTTHardwareObjectTrigger
CanTTHardwareObjectTrigger is specified in the SWS TTCAN and contains the configuration (parameters) of TTCAN triggers for Hardware Objects, which are additional to the configuration (parameters) of CAN Hardware Objects.
5.2.11.1.1.74. CanTTHardwareObjectBaseCycle
Item |
|
|---|---|
Name |
CanTTHardwareObjectBaseCycle |
Description |
Defines the cycle_offset. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
63 |
Min-value |
0 |
5.2.11.1.1.75. CanTTHardwareObjectCycleRepetition
Item |
|
|---|---|
Name |
CanTTHardwareObjectCycleRepetition |
Description |
Defines the repeat_factor. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1 |
Max-value |
64 |
Min-value |
1 |
5.2.11.1.1.76. CanTTHardwareObjectTimeMark
Item |
|
|---|---|
Name |
CanTTHardwareObjectTimeMark |
Description |
Defines the point in time, when the trigger will be activated. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
65535 |
Min-value |
0 |
5.2.11.1.1.77. CanTTHardwareObjectTriggerId
Item |
|
|---|---|
Name |
CanTTHardwareObjectTriggerId |
Description |
Sequential number which allows separation of different TTCAN triggers configured for one and the same hardware object. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
63 |
Min-value |
0 |
5.2.11.1.1.78. CanTTHardwareObjectTriggerType
Item |
|
|---|---|
Name |
CanTTHardwareObjectTriggerType |
Description |
Defines the type of the trigger associated with the hardware object. This parameter depends on plain CAN parameter CAN_OBJECT_TYPE. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
true |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_TT_RX_TRIGGER |
Range |
CAN_TT_RX_TRIGGER |
5.2.11.1.1.79. CanIcom
This container contains the parameters for configuring pretended networking
5.2.11.1.1.80. CanIcomConfig
This container contains the configuration parameters of the ICOM Configuration.
5.2.11.1.1.81. CanIcomConfigId
Item |
|
|---|---|
Name |
CanIcomConfigId |
Description |
This parameter identifies the ID of the ICOM configuration. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1 |
Max-value |
255 |
Min-value |
1 |
5.2.11.1.1.82. CanIcomWakeOnBusOff
Item |
|
|---|---|
Name |
CanIcomWakeOnBusOff |
Description |
This parameter defines that the MCU shall wake if the bus off is detected or not. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
true |
5.2.11.1.1.83. CanIcomWakeupCauses
This container contains the configuration parameters of the wakeup causes to leave the power saving mode.
5.2.11.1.1.84. CanIcomRxMessage
This container contains the configuration parameters for the wakeup causes for matching received messages. It has to be configured as often as received messages are defined as wakeup cause.
5.2.11.1.1.85. CanIcomCounterValue
Item |
|
|---|---|
Name |
CanIcomCounterValue |
Description |
This parameter defines that the MCU shall wake if the message with the ID is received n times on the communication channel. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
1 |
Max-value |
65536 |
Min-value |
1 |
5.2.11.1.1.86. CanIcomMessageId
Item |
|
|---|---|
Name |
CanIcomMessageId |
Description |
This parameter defines the message ID the wakeup causes of this CanIcomRxMessage are configured for. In addition a mask (CanIcomMessageIdMask) can be defined, in that case it is possible to define a range of rx messages, which can create a wakeup condition. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
536870912 |
Min-value |
0 |
5.2.11.1.1.87. CanIcomMessageIdMask
Item |
|
|---|---|
Name |
CanIcomMessageIdMask |
Description |
Describes a mask for filtering of CAN identifiers. The CAN identifiers of incoming messages are masked with this CanIcomMessageIdMask. If the masked identifier matches the masked value of CanIcomMessageId, it can create a wakeup condition for this CanIcomRxMessage. Bits holding a 0 mean don’t care, i.e. do not compare the message’s identifier in the respective bit position. The mask shall be build by filling with leading 0. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
536870912 |
Min-value |
0 |
5.2.11.1.1.88. CanIcomMissingMessageTimerValue
Item |
|
|---|---|
Name |
CanIcomMissingMessageTimerValue |
Description |
This parameter defines that the MCU shall wake if the message with the ID is not received for a specific time in s on the |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.0 |
Max-value |
5.36870912E8 |
Min-value |
0.0 |
5.2.11.1.1.89. CanIcomPayloadLengthError
Item |
|
|---|---|
Name |
CanIcomPayloadLengthError |
Description |
This parameter defines that the MCU shall wake if a payload error occurs |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.1.90. CanIcomRxMessageSignalConfig
This container contains the configuration parameters for the wakeup causes for matching signals.
5.2.11.1.1.91. CanIcomSignalMask
Item |
|
|---|---|
Name |
CanIcomSignalMask |
Description |
This parameter shall be used to mask a signal in the payload of a CAN message. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
18446744073709551615 |
Min-value |
0 |
5.2.11.1.1.92. CanIcomSignalOperation
Item |
|
|---|---|
Name |
CanIcomSignalOperation |
Description |
This parameter defines the operation, which shall be used to verify the signal value creates a wakeup condition. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
EQUAL |
Range |
AND |
5.2.11.1.1.93. CanIcomSignalValue
Item |
|
|---|---|
Name |
CanIcomSignalValue |
Description |
This parameter shall be used to define a signal value which shall be compared (CanIcomSignalOperation) with the masked CanIcomSignalMask value of the received signal (CanIcomSignalRef). |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
18446744073709551615 |
Min-value |
0 |
5.2.11.1.1.94. CanIcomSignalRef
Item |
|
|---|---|
Name |
CanIcomSignalRef |
Description |
This parameter defines a reference to the signal which shall be checked additional to the message id (CanIcomMessageId). |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.2. CanGeneral
This container contains the parameters related each CAN Driver Unit.
5.2.11.1.2.1. CanDevErrorDetect
Item |
|
|---|---|
Name |
CanDevErrorDetect |
Description |
Switches the development error detection and notification on or off. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.2.2. CanIndex
Item |
|
|---|---|
Name |
CanIndex |
Description |
Specifies the InstanceId of this module instance. If only one instance is present it shall have the Id 0. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0 |
Max-value |
255 |
Min-value |
0 |
5.2.11.1.2.3. CanLPduReceiveCalloutFunction
Item |
|
|---|---|
Name |
CanLPduReceiveCalloutFunction |
Description |
This parameter defines the existence and the name of a callout function that is called after a successful |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
NULL_PTR |
5.2.11.1.2.4. CanMainFunctionBusoffPeriod
Item |
|
|---|---|
Name |
CanMainFunctionBusoffPeriod |
Description |
This parameter describes the period for cyclic call to Can_MainFunction_Busoff. Unit is seconds. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.01 |
Max-value |
INF |
Min-value |
0.0 |
5.2.11.1.2.5. CanMainFunctionModePeriod
Item |
|
|---|---|
Name |
CanMainFunctionModePeriod |
Description |
This parameter describes the period for cyclic call to Can_MainFunction_Mode. Unit is seconds. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.01 |
Max-value |
INF |
Min-value |
0.0 |
5.2.11.1.2.6. CanMainFunctionWakeupPeriod
Item |
|
|---|---|
Name |
CanMainFunctionWakeupPeriod |
Description |
This parameter describes the period for cyclic call to Can_MainFunction_Wakeup. Unit is seconds. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.01 |
Max-value |
INF |
Min-value |
0.0 |
5.2.11.1.2.7. CanMultiplexedTransmission
Item |
|
|---|---|
Name |
CanMultiplexedTransmission |
Description |
Specifies if multiplexed transmission shall be supported.ON or OFF. This parameter is not used. Use of Transmit FIFO is equivalent to multiplexed transmission. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.2.8. CanPublicIcomSupport
Item |
|
|---|---|
Name |
CanPublicIcomSupport |
Description |
Selects support of Pretended Network features in Can driver. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.2.9. CanECCSupport
Item |
|
|---|---|
Name |
CanECCSupport |
Description |
Enable SRAM ECC configuration. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.2.10. CanSetBaudrateApi
Item |
|
|---|---|
Name |
CanSetBaudrateApi |
Description |
The support of the Can_SetBaudrate API is optional. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.2.11. CanTimeoutDuration
Item |
|
|---|---|
Name |
CanTimeoutDuration |
Description |
Specifies the maximum time for blocking function until a timeout is detected. Unit is seconds. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.1 |
Max-value |
65.535 |
Min-value |
1.0E-6 |
5.2.11.1.2.12. CanVersionInfoApi
Item |
|
|---|---|
Name |
CanVersionInfoApi |
Description |
Switches the Can_GetVersionInfo() API ON or OFF. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
false |
5.2.11.1.2.13. CanOsCounterRef
Item |
|
|---|---|
Name |
CanOsCounterRef |
Description |
This parameter contains a reference to the OsCounter, which is used by the CAN driver. Note: The CAN driver does not currently utilize this parameter |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.2.14. CanSysClockRef
Item |
|
|---|---|
Name |
CanSysClockRef |
Description |
This parameter references the SYSCLK to convert timeout values from milliseconds to clock ticks. Users should ensure the correct clock reference point is selected to achieve accurate timeout calculations. |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Post-Build-Time |
VARIANT-POST-BUILD |
5.2.11.1.2.15. CanSupportTTCANRef
Item |
|
|---|---|
Name |
CanSupportTTCANRef |
Description |
The parameter refers to CanIfSupportTTCAN parameter in the CAN Interface Module configuration. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
5.2.11.1.2.16. CanIcomGeneral
This container contains the general configuration parameters of the ICOM Configuration.
5.2.11.1.2.17. CanIcomLevel
Item |
|
|---|---|
Name |
CanIcomLevel |
Description |
Defines the level of Pretended Networking. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Origin |
AUTOSAR_ECUC |
Post-build-variant-multiplicity |
false |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_ICOM_LEVEL_ONE |
Range |
CAN_ICOM_LEVEL_ONE |
5.2.11.1.2.18. CanIcomVariant
Item |
|
|---|---|
Name |
CanIcomVariant |
Description |
Defines the variant, which is supported by this CanController |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
CAN_ICOM_VARIANT_SW |
Range |
CAN_ICOM_VARIANT_HW |
5.2.11.1.2.19. CanMainFunctionRWPeriods
This container contains the parameter for configuring the period for cyclic call to Can_MainFunction_Read or Can_MainFunction_Write depending on the referring item.
5.2.11.1.2.20. CanMainFunctionPeriod
Item |
|
|---|---|
Name |
CanMainFunctionPeriod |
Description |
This parameter describes the period for cyclic call to Can_MainFunction_Read or Can_MainFunction_Write depending on the referring item. Unit is seconds. Different poll-cycles will be configurable if more than one CanMainFunctionPeriod is configured. In this case multiple Can_MainFunction_Read() or Can_MainFunction_Write() will be provided by the CAN Driver module. |
Origin |
AUTOSAR_ECUC |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Default-value |
0.01 |
Max-value |
INF |
Min-value |
0.0 |
5.2.11.1.2.21. CanDemEventParameterRefs
Item |
|
|---|---|
Name |
CanDemEventParameterRefs |
Description |
Container for the references to DemEventParameter elements which shall be invoked using the API Dem_SetEventStatus in case the corresponding error occurs. The EventId is taken from the referenced DemEventParameter’s DemEventId symbolic value. The standardized errors are provided in this container and can be extended by vendor-specific error references. |
Multiplicity-Configuration-Class |
– |
Post-Build Time |
VARIANT-POST-BUILD |
Pre-Compile Time |
VARIANT-PRE-COMPILE |
Post-build-variant-multiplicity |
false |
Origin |
Texas Instruments |
Post-Build-Variant-Value |
false |
Value-Configuration-Class |
– |
Post-Build-Time |
VARIANT-POST-BUILD |
Pre-Compile-Time |
VARIANT-PRE-COMPILE |
Refer AUTOSAR_SWS_CANDriver section: 10 Configuration specification for configuration parameters details |
5.2.11.2. Bit Timing and Sampling Point Calculation
Selecting the correct CAN bit timing parameters (prescaler, TSEG1, TSEG2, SJW) for a given clock frequency, target bit rate, and desired sampling point can be complex. A Microsoft Excel–based bit timing calculator is provided to assist with this.
Note
Download the calculator: MCAN_BitTimingCalculator.xls
Open the sheet, enter your CAN clock frequency and target bit rate, and the calculator will derive valid prescaler, TSEG1, TSEG2, and SJW values along with the resulting sampling point percentage for both the nominal (arbitration) phase and the data phase (CAN FD).
5.2.11.3. Steps To Configure Can Module
Open EB Tresos configurator tool and load Port, Mcu and Can modules
Open PORT module plugin and configure required pins as CAN-TX, CAN-RX
Open CAN module plugin, Select the Config Variant (Pre-compile/Link-Time)
In CAN module plugin configure required parameters.
Save the configuration and generate the configuration.
5.2.12. Examples
The example application demonstrates use of Can module, the list below identifies key steps performed the example.
5.2.12.1. Can_Example_loopback
5.2.12.1.1. Overview of Can_Example_loopback
Can_Example_loopback
EcuM_Init()
Initializes clock to 200 MHz using Mcu_Init()
Initializes pins as CAN-Tx and CAN-Rx using Port_Init()
Initializes Can instances in loopback mode.
Set controller state to STARTED.
Send the data using can_write() with pre-defined data.
Read Tx confirmation and rx indication.
Validate the received data with pre-defined transmit data.
5.2.12.1.2. Setup required to run Can_Example_loopback
Connect the hardware and power up
Connect the uart set up to check the log on serial console
5.2.12.1.3. How to run Can_Example_loopback
Open CCS and Import Can_Example_loopback example
Build project and start debug project
5.2.12.1.4. Sample Log of Can_Example_loopback
Can_Example_loopback : Sample Application - STARTS !!!
Can_Example_loopback : Can Controller: MCAN A
Can_Example_loopback : Can Transmission Started
Can_Example_loopback : Transmitted and Received Message Id is 0x64
Can_Example_loopback : Sample Application success
5.2.12.2. Can_Example_Classic_FD
5.2.12.2.1. Overview of Can_Example_Classic_FD
Can_Example_Classic_FD
EcuM_Init()
Initializes clock to 200 MHz using Mcu_Init()
Initializes pins as CAN-Tx and CAN-Rx using Port_Init()
Initializes Can instances
Set controller state to STARTED.
Set PCAN with the same setting.
Start sending predefined data from PCAN
Send the data using can_write() with pre-defined data.
Read Tx confirmation and rx indication.
Validate the received data with pre-defined transmit data.
5.2.12.2.2. Setup required to run Can_Example_Classic_FD
Connect the hardware and power up
Connect CANA Tx and Rx pins to CAN transceiver
Connect PCAN CANH, CANL to CAN transceiver
Connect the uart set up to check the log on serial console
5.2.12.2.3. How to run Can_Example_Classic_FD
Open CCS and Import Can_Example_Classic_FD example
Build project and start debug project
5.2.12.2.4. Sample Log of Can_Example_Classic_FD
Can_Example_Classic_FD : Sample Application - STARTS !!!
Can_Example_Classic_FD : Can Controller: MCAN A
Can_Example_Classic_FD : Mode: Can classic, Transmitted ID value: 0x64, and length : 8
Can_Example_Classic_FD : Transmission data: 0xa1 0x1a 0xff 0xff 0xc1 0x1c 0xb1 0x1b
Can_Example_Classic_FD : Can Transmission Started
Can_Example_Classic_FD : please press 1 if transmitted data matched
Can_Example_Classic_FD : Send the data from PCAN as below
Can_Example_Classic_FD : Mode: Can Classic, ID value: 0x64, and length : 8
Can_Example_Classic_FD : data: 0xd1 0x1d 0xff 0xff 0xf1 0x1f 0xe1 0x1e
Can_Example_Classic_FD : please press any key after transmitted data
Can_Example_Classic_FD : Received Message Id is 0x64
Can_Example_Classic_FD : Mode: Can FD, Transmitted ID value: 0x40000101, and length : 64
Can_Example_Classic_FD : Transmission data: 0xa1 0x1a 0xff 0xff 0xc1 0x1c 0xb1 0x1b 0xa2 0x2a 0xff 0xff 0xc2 0x2c 0xb2 0x2b 0xa3 0x3a 0xff 0xff 0xc3 0x3c 0xb3 0x3b 0xa4 0x4a 0xff 0xff 0xc4 0x4c 0xb4 0x4b 0xa5 0x5a 0xff 0xff 0xc5 0x5c 0xb5 0x5b 0xa6 0x6a 0xff 0xff 0xc6 0x6c 0xb6 0x6b 0xa7 0x7a 0xff 0xff 0xc7 0x7c 0xb7 0x7b 0xa8 0x8a 0xff 0xff 0xc8 0x8c 0xb8 0x8b
Can_Example_Classic_FD : Can Transmission Started
Can_Example_Classic_FD : please press 1 if transmitted data matched
Can_Example_Classic_FD : Send the data from PCAN as below
Can_Example_Classic_FD : Mode: Can FD, ID value: 0x40000101, and length : 64
Can_Example_Classic_FD : data: 0xd1 0x1d 0xff 0xff 0xf1 0x1f 0xe1 0x1e 0xd2 0x2d 0xff 0xff 0xf2 0x2f 0xe2 0x2e 0xd3 0x3d 0xff 0xff 0xf3 0x3f 0xe3 0x3e 0xd4 0x4d 0xff 0xff 0xf4 0x4f 0xe4 0x4e 0xd5 0x5d 0xff 0xff 0xf5 0x5f 0xe5 0x5e 0xd6 0x6d 0xff 0xff 0xf6 0x6f 0xe6 0x6e 0xd7 0x7d 0xff 0xff 0xf7 0x7f 0xe7 0x7e 0xd8 0x8d 0xff 0xff 0xf8 0x8f 0xe8 0x8e
Can_Example_Classic_FD : please press any key after transmitted data
Can_Example_Classic_FD : Received Message Id is 0x40000101
Can_Example_Classic_FD : Sample Application success
5.2.12.3. Can_Example_Icom
5.2.12.3.1. Overview of Can_Example_Icom
Can_Example_Icom
EcuM_Init()
Initializes clock to 200 MHz using Mcu_Init()
Initializes pins as CAN-Tx and CAN-Rx using Port_Init()
Initializes Can instances
Set PCAN with the same setting.
Start sending predefined data from PCAN
Send the data using can_write() with pre-defined data.
Read Tx confirmation and rx indication.
Validate the received data with pre-defined Transmit data.
Set Icom configuration by calling Can_SetIcomConfiguration.
Send pre-defined data from the PCAN same as Icom signal configuration.
Read Rx indication.
5.2.12.3.2. Setup required to run Can_Example_Icom
Connect the hardware and power up
Connect CANA Tx and Rx pins to CAN transceiver
Connect PCAN CANH, CANL to CAN transceiver
Connect the uart set up to check the log on serial console
5.2.12.3.3. How to run Can_Example_Icom
Open CCS and Import Can_Example_Icom example
Build project and start debug project
5.2.12.3.4. Sample Log of Can_Example_Icom
Can_Example_Icom : Sample Application - STARTS !!!
ICOM ConfigurationCan_Example_Icom : Can Controller: MCAN A
Can_Example_Icom : Transmitted ID value: 0x64 and length : 8
Can_Example_Icom : Transmission data: 0xa1 0x1a 0xff 0xff 0xc1 0x1c 0xb1 0x1b
Can_Example_Icom : Can Transmission Started
Can_Example_Icom : Enabling pretended networking.
Can_Example_Icom : Enabling pretended networking.
Can_Example_Icom : Sample Application for pretended networking was success
5.2.12.4. Can_Example_Wakeup
5.2.12.4.1. Overview of Can_Example_Wakeup
Can_Example_Wakeup
This example demonstrates CAN wakeup functionality with CAN Classic and FD modes
Enables one controller with 2 hardware objects for Tx and 2 hardware objects for Rx
Validates received data against transmitted data
DeviceSupport_Init()
EcuM_Init()
Initialize clock using Mcu_Init()
Initialize pins with Port_Init()
Initialize CAN driver using Can_Init()
Set controller state to STARTED
Configure PCAN with matching settings:
Mode: CAN, Clock Freq: 80 MHz
BitRate: 1000 kbit/s, Sample Point: 60%
Pre-scaler: 8, TSEG1: 5, TSEG2: 4
Send predefined data from PCAN (CAN-ID: 101h, Length: 8)
Send data using Can_Write() with predefined data
Read Tx confirmation and Rx indication
Validate received data with predefined receive data
Set controller state to SLEEP
Send predefined data from PCAN to trigger wakeup
Check for wakeup event detection
If wakeup event is detected, verify Rx indication is zero (message not received in sleep mode)
5.2.12.4.2. Setup required to run Can_Example_Wakeup
Connect the hardware and power up
Connect PCAN tool to the CAN bus
Connect the UART setup to check the log on serial console
5.2.12.4.3. How to run Can_Example_Wakeup
Open CCS and import Can_Example_Wakeup
Build project and start debug project
Follow the prompts to send data from PCAN when requested
5.2.12.4.4. Sample Log of Can_Example_Wakeup
Can_Example_Wakeup : Sample Application - STARTS !!!
Can_Example_Wakeup : Can Controller: MCAN A
Can_Example_Wakeup : Transmitted ID value: 0x64 and length : 8
Can_Example_Wakeup : Transmission data: 0xa1 0x1a 0xff 0xff 0xc1 0x1c 0xb1 0x1b
Can_Example_Wakeup : Can Transmission Started
Can_Example_Wakeup : Changing MCAN state to SLEEP
Can_Example_Wakeup : Send the data from PCAN.
Please press 1 after sending data from PCAN
Can_Example_Wakeup : Can wakeup event occured
Can_Example_Wakeup : Sample Application success
5.2.12.5. File Structure
📦f29H85x_mcal
┣ 📂build
┣ 📂docs
┣ 📂drivers
┣ 📂examples
┃ ┣ 📂AppUtils
┃ ┣ 📂Can
┃ ┃ ┣ 📂 Can_Example_Classic_FD
┃ ┃ ┣ 📂 Can_Example_Icom
┃ ┃ ┗ 📂 Can_Example_loopback
┃ ┃ ┃ ┣ 📂ccs
┃ ┃ ┃ ┃ ┗ 📜Can_Example_loopback.projectspec
┃ ┃ ┃ ┣ 📂f29h85x_config
┃ ┃ ┃ ┃ ┣ 📂config
┃ ┃ ┃ ┃ ┃ ┣ 📜Can.xdm : Generated EB Tresos config file in .xdm format
┃ ┃ ┃ ┃ ┃ ┣ 📜Dem.xdm
┃ ┃ ┃ ┃ ┃ ┣ 📜EcuM.xdm
┃ ┃ ┃ ┃ ┃ ┣ 📜Mcu.xdm
┃ ┃ ┃ ┃ ┃ ┣ 📜Os.xdm
┃ ┃ ┃ ┃ ┃ ┗ 📜Port.xdm
┃ ┃ ┃ ┃ ┣ 📂include
┃ ┃ ┃ ┃ ┃ ┣ 📜Can_Cfg.h : Contains the generated pre-compiler configuration header.*
┃ ┃ ┃ ┃ ┃ ┣ 📜Dem_Cfg.h
┃ ┃ ┃ ┃ ┃ ┣ 📜EcuM_Cfg.h
┃ ┃ ┃ ┃ ┃ ┣ 📜Mcu_Cfg.h
┃ ┃ ┃ ┃ ┃ ┣ 📜Os_Cfg.h
┃ ┃ ┃ ┃ ┃ ┗ 📜Port_Cfg.h
┃ ┃ ┃ ┃ ┣ 📂src
┃ ┃ ┃ ┃ ┃ ┣ 📜Can_Cfg.c : Contains the pre-compile configuration parameters.
┃ ┃ ┃ ┃ ┃ ┣ 📜Dem_Cfg.c
┃ ┃ ┃ ┃ ┃ ┣ 📜EcuM_Cfg.c
┃ ┃ ┃ ┃ ┃ ┣ 📜Mcu_PBcfg.c
┃ ┃ ┃ ┃ ┃ ┣ 📜Os_Cfg.c
┃ ┃ ┃ ┃ ┃ ┗ 📜Port_PBcfg.c
┃ ┃ ┃ ┃ ┗ 📜CMakeLists.txt
┃ ┃ ┃ ┣ 📜CMakeLists.txt
┃ ┃ ┃ ┣ 📜Can_Example_loopback.c : Example application for CAN
┃ ┃ ┗ ┗ 📜Can_Example_loopback.h : Contains data structures and Internal function declarations.
┃ ┣ 📂DeviceSupport
┃ ┣ 📂Dio
┃ ┣ 📂Gpt
┃ ┣ 📂Mcu
┃ ┣ 📂Port
┃ ┗ 📜CMakeLists.txt
┣ 📂plugins
┣ 📜CMakeLists.txt
┗ 📜CMakePresets.json
Note
Can_PBcfg.c and Can_Cfg.c will be present if Post-Build config variant is selected, only Can_Cfg.c will be present if Pre-Compile variant is selected