3.2.4.15. UART¶
3.2.4.15.1. Introduction¶
This guide covers 8250 OMAP serial driver found at drivers/tty/serial/8250/8250_omap.c. It supports UART IP found on TI’s AM335x SoCs. These SoCs have 8250 compliant UART IPs and hence use common 8250 serial driver framework support of Linux kernel.
This documentation applies to Kernel v4.14 and higher.
Suppported Devices
- AM335x devices
3.2.4.15.2. Driver Features¶
Driver Features
Driver supports the following features:
- Hardware flow control
- Standard Baudrates upto 3MBaud
- DMA support (except AM437x)
Driver Configuration
Driver Source Location: drivers/tty/serial/8250/8250_omap.c
Kernel configuration options

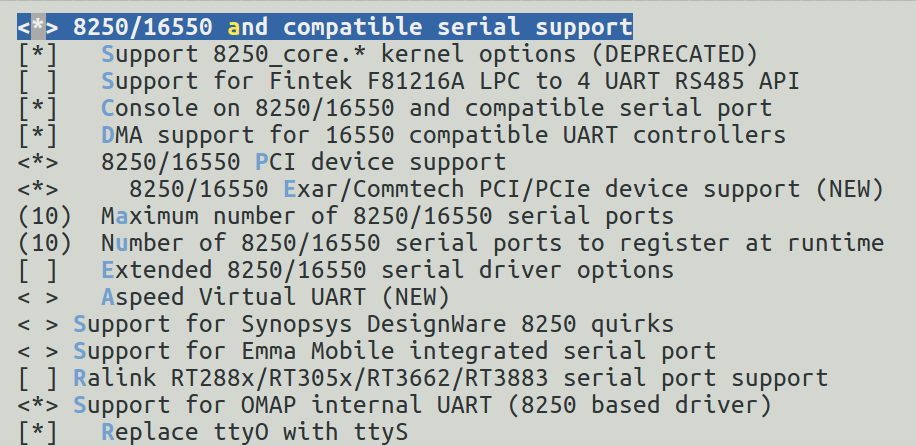
Configs to be enabled in kernel
CONFIG_SERIAL_8250 (8250 core support)
CONFIG_SERIAL_8250_CONSOLE (for console on 8250 UARTs)
CONFIG_SERIAL_8250_DMA (for DMA support)
SERIAL_8250_OMAP (Enable 8250 based driver for TI SoCs)
Example DT configuration
From k3-j721e.dtsi
aliases {
...
serial0 = &wkup_uart0;
serial1 = &mcu_uart0;
serial2 = &main_uart0;
serial3 = &main_uart1;
...
};
From k3-j721e-main.dtsi
main_uart0: serial@2800000 {
compatible = "ti,j721e-uart", "ti,am654-uart";
reg = <0x00 0x02800000 0x00 0x100>;
reg-shift = <2>;
reg-io-width = <4>;
interrupts = <GIC_SPI 192 IRQ_TYPE_LEVEL_HIGH>;
clock-frequency = <48000000>;
current-speed = <115200>;
power-domains = <&k3_pds 146 TI_SCI_PD_SHARED>;
clocks = <&k3_clks 146 0>;
clock-names = "fclk";
};
main_uart1: serial@2810000 {
compatible = "ti,j721e-uart", "ti,am654-uart";
reg = <0x00 0x02810000 0x00 0x100>;
reg-shift = <2>;
reg-io-width = <4>;
interrupts = <GIC_SPI 193 IRQ_TYPE_LEVEL_HIGH>;
clock-frequency = <48000000>;
current-speed = <115200>;
power-domains = <&k3_pds 278 TI_SCI_PD_EXCLUSIVE>;
clocks = <&k3_clks 278 0>;
clock-names = "fclk";
};
Driver Usage
Once the driver is probed, each of serial ports are exposed as a character device file by the kernel to be used by userspace:
/dev/ttySX X- Serial port number (zero indexed)
Therefore UART0 -> /dev/ttyS0
Reading from serial port:
cat /dev/ttyS0
Writing to serial port:
echo "hello" > /dev/ttyS0
Changing serial port baudrate:
stty -F /dev/ttyS0 <baudrate>
stty -F /dev/ttyS0 115200
Testing UART communication
Either connect two UART ports to one other with flow control lines, or connect a single UART in external loopback mode(RTS-CTS, RX-TX). Internal loopback mode cannot be used for testing UART, as there is no guarantee that HW flow control will work reliably.
3.2.4.15.3. Basic External loopback testing¶
stty -F /dev/ttySX 115200 /* Set baudrate to 115200: */
cat /dev/ttySX &
echo hello > /de/ttySX
This should print “hello” on the shell. That verifies RX-TX external loopback.
Testing UART communication with HW flow control
Make sure all the pins are connected properly (RTS-CTS, RX-TX) and pinmux is setup. Clone the following repo for tool to test serial port:
Compile serialcheck tool:
~/serialcheck$ gcc -o serialcheck serialcheck.c CROSS_COMPILE=arm-linux-gnueabihf-
Compile serialstats tool:
~/serialcheck$ gcc -o serialstats serialstats.c CROSS_COMPILE=arm-linux-gnueabihf-
serialcheck: Used to configure UART and then send/receive data over UART. The tool reports any inconsistencies observed during UART transfer by comparing it with a reference file.
For more information run:
serialcheck --help
serialstats: Prints UART statistics provided by Kernel’s tty layer.
For more information run:
serialstats --help
Create a random file:
dd if=/dev/urandom of=binary count=1 bs=4096
Copy the random file to both nodes (TX side and RX side).
Start serialstats in the background to collect stats/errors:
serialstats -d /dev/ttySX -i 1 &
Start the test (with HW flow control enabled at 3MBaud):
receiving node(-m r):
serialcheck -h -d /dev/ttyS0 -f binary -m r -l 10 -b 3000000
sending node(-m t):
serialcheck -h -d /dev/ttyS0 -f binary -m t -l 10 -b 3000000
Start the receiving side before the sending side. This will transfer the “binary” file 10 times, and the other side will expect the file 10 times.
Once the program completes both sides should write something similar if the test was successful.
Needed 0 reads 1 writes loops 10 / 10
cts: 3 dsr: 0 rng: 0 dcd: 0 rx: 40960 tx: 40960 frame 0 ovr 0 par: 0 brk: 0 buf_ovrr: 0
Or an example output if there is an error:
Needed 20 reads 0 writes Oh oh, inconsistency at pos 2273 (0x8e1).
Original sample:
000008b0: 28 b2 18 c9 ec b5 2c b3 3a a1 29 b1 fc 27 20 7f (.....,.:.)..' .
000008c0: 42 f8 d5 cb d8 52 ec b5 c8 76 d3 4b d2 57 44 6a B....R...v.K.WDj
000008d0: 40 81 6a 82 27 fd 8d 50 84 70 bc 24 6b 3d 88 fd @.j.'..P.p.$k=..
000008e0: 9f ac 78 a4 76 9b f9 1c 74 2c d6 79 22 60 c5 de ..x.v...t,.y"`..
000008f0: 02 9c fb 52 21 4b 40 6f 80 69 2e 80 df 12 ba a0 ...R!K@o.i......
00000900: 75 57 d5 22 33 c0 f3 bc 94 f8 aa 22 9d 02 59 20 uW."3......"..Y
Received sample:
000008b0: 28 b2 18 c9 ec b5 2c b3 3a a1 29 b1 fc 27 20 7f (.....,.:.)..' .
000008c0: 42 f8 d5 cb d8 52 ec b5 c8 76 d3 4b d2 57 44 6a B....R...v.K.WDj
000008d0: 40 81 6a 82 27 fd 8d 50 84 70 bc 24 6b 3d 88 fd @.j.'..P.p.$k=..
000008e0: 9f 00 ac 78 a4 76 9b f9 1c 74 2c d6 79 22 60 c5 ...x.v...t,.y"`.
000008f0: de 02 9c fb 52 21 4b 40 6f 80 69 2e 80 df 12 ba ....R!K@o.i.....
00000900: a0 75 57 d5 22 33 c0 f3 bc 94 f8 aa 22 9d 02 59 .uW."3......"..Y
loops 54878 / 4294967295
cts: 0 dsr: 0 rng: 0 dcd: 0 rx: 224792017 tx: 223379456 frame 0 ovr 1 par: 0 brk: 0 buf_ovrr: 0
Meaning of different counters
cts: Number of times flow control lines was asserted
dsr/rng/dcd: Correspond to Modem control line statistics
rx/tx: The rx and tx counters. Denotes number of bytes sent/received in the session. A mismatch here would indicate data loss.
frame: Number of framing errors
ovr: Number of times UART HW FIFO overruns
par: Number of parity errors
brk: Number of times break character was received. (For more details on above errors see: https://en.wikipedia.org/wiki/Universal_asynchronous_receiver-transmitter)
buf_ovrr: Number of bytes lost due to overrun software buffer at kernel’s tty layer.
Standalone Testing of HW flow control
Start only TX side of serial check:
serialcheck -h -d /dev/ttySX -f binary -m t -l 10 -b 3000000
Run only serialstats on the RX side without starting RX receiver process.
serialstats -d /dev/ttySX -i 1
If cts is non zero and ovr and buf_ovrr are not reported, then HW flow control is working.
Note
- Make sure to start the RX side before starting TX.
- RX side waits for 100s before reporting timeout. Make sure TX side starts sending data before 100s.
- serialcheck tool does not support duplex mode(-m d -> simulatenous RX and TX). Workaround would be to start second send/receive pair in reverse direction.
Probable reason for different errors
Frame error/parity error: Mostly due to faulty external loopback connection or signal interference on the wire
overruns: This field corresponds to HW FIFO overruns. TI’s 8250 UART IP supports auto HW flow control as long as flow control is enabled in IP by the driver and the RTS-CTS lines are connected. Overrun indicates either the HW flow control lines are not connected or it is not turned on by userspace (pass -h option when using serialcheck).
buf_ovrr: indicates either a driver bug or tty ldisc driver bug (default ldisc is n_tty drivers/tty/n_tty.c). It is the duty of ldisc layer to call the uart_throttle() function if the receiver is overwhelmed to avoid buf_ovrr.
- One other tool to test the UART driver would be: https://github.com/cbrake/linux-serial-test
- To explore/use other features of UART port, please use system calls provided by termios.h: http://man7.org/linux/man-pages/man3/termios.3.html
- This file shows an example of how to enable HW flow control, set baudrate, and change other tty settings: https://github.com/nsekhar/serialcheck/blob/master/serialcheck.c
Note
It is always recommended to connect HW flow control lines for UART communication. Also, software should enable HW flow control explicitly. Otherwise, there will be data loss and data corruption.