Threading Modules¶
The TI-RTOS kernel manages four distinct context levels of thread execution as shown in Figure 4. The list of thread modules are shown below in a descending order in terms of priority.
- A Hwi or Hardware interrupt
- A Swi or Software interrupt
- Tasks
- The Idle Task for background idle functions
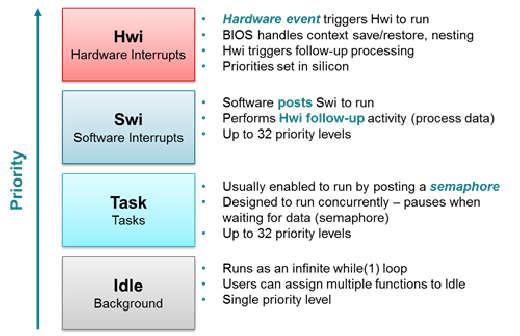
Figure 4. TI-RTOS Execution Threads
This section describes these four execution threads and various structures used throughout the TI-RTOS for messaging and synchronization.
Hardware Interrupts (Hwi)¶
Hwi threads (also called Interrupt Service Routines or ISRs) are the threads with the highest priority in a TI-RTOS application. Hwi threads are used to perform time critical tasks that are subject to hard deadlines. They are triggered in response to external asynchronous events (interrupts) that occur in the real-time environment. Hwi threads always run to completion but can be preempted temporarily by Hwi threads triggered by other interrupts, if enabled. Specific information on the nesting, vectoring, and functionality of interrupts can be found in the CC26x2 Technical Reference Manual.
Generally, interrupt service routines are kept short as not to affect the hard real-time system requirements. Also, as Hwis must run to completion, no blocking APIs may be called from within this context.
TI-RTOS drivers that require interrupts will initialize the required interrupts for the assigned peripheral.
Note
Debugging provides an example of using GPIOs and Hwis. While the SDK includes a peripheral driver library to abstract hardware register access, it is suggested to use the thread-safe TI-RTOS drivers.
The Hwi module for the CC26x2 also supports Zero-latency interrupts. These interrupts do not go through the TI-RTOS Hwi dispatcher and therefore are more responsive than standard interrupts, however this feature prohibits its interrupt service routine from invoking any TI-RTOS kernel APIs directly. It is up to the ISR to preserve its own context to prevent it from interfering with the kernel’s scheduler.
Software Interrupts (Swi)¶
Patterned after hardware interrupts (Hwi), software interrupt threads provide additional priority levels between Hwi threads and Task threads. Unlike Hwis, which are triggered by hardware interrupts, Swis are triggered programmatically by calling certain Swi module APIs. Swis handle threads subject to time constraints that preclude them from being run as tasks, but whose deadlines are not as severe as those of hardware ISRs. Like Hwis, Swi threads always run to completion. Swis allow Hwis to defer less critical processing to a lower-priority thread, minimizing the time the CPU spends inside an interrupt service routine, where other Hwis can be disabled. Swis require only enough space to save the context for each Swi interrupt priority level, while Tasks use a separate stack for each thread.
Similar with Hwis, Swis should be kept to short and may not include any
blocking API calls. This allows high priority tasks such as the wireless
protocol stack to execute as needed. It is suggested to _post() some
TI-RTOS synchronization primitive to allow for further post processing from
within a Task context. See Figure 5. to illustrate such
a use-case.
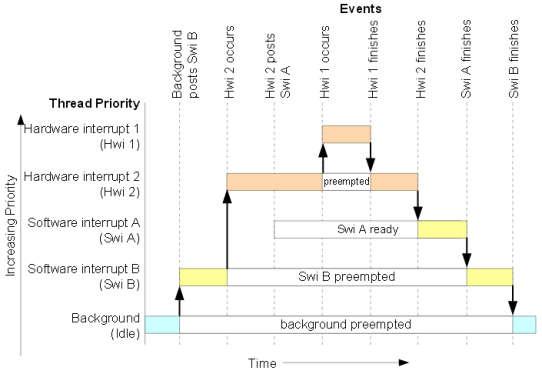
Figure 5. Preemption Scenario
The commonly used Clock module operates from within a Swi context. It is important that functions called by a Clock object do not invoke blocking APIs and are rather short in execution.
Task¶
Task threads have higher priority than the background (Idle) thread and lower priority than software interrupts. Tasks differ from software interrupts in that they can wait (block) during execution until necessary resources are available. Tasks require a separate stack for each thread. TI-RTOS provides a number of mechanisms that can be used for inter-task communication and synchronization. These include Semaphores, Event, Message queues, and Mailboxes.
Idle Task¶
Idle threads execute at the lowest priority in a TI-RTOS application and are executed one after another in a continuous loop (the Idle Loop). After main returns, a TI-RTOS application calls the startup routine for each TI-RTOS module and then falls into the Idle Loop. Each thread must wait for all others to finish executing before it is called again. The Idle Loop runs continuously except when it is preempted by higher-priority threads. Only functions that do not have hard deadlines should be executed in the Idle Loop.
For CC26x2 devices, the Idle Task allows the Power Policy Manager to enter the lowest allowable power savings.