5.3.2. Video Analytics¶
Overview
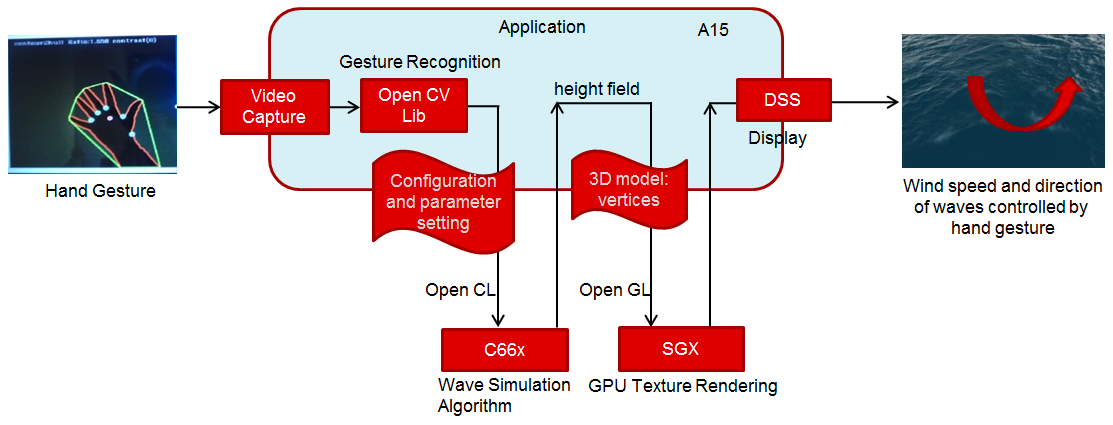
The Video Analytics demo shipped with the Processor SDK Linux for AM57xx showcases how a Linux Application running on Cortex A-15 cluster can take advantage of C66x DSP, 3D SGX hardware acceleration blocks to process a real-time camera input feed and render the processed output on display - all using open programming paradigms such as OpenCV, OpenCL, OpenGL, and Qt and standard Linux drivers for capture/display.
A hand gesture is detected using morphological operators from OpenCV library. The gesture is used to control a parameter (wind speed) used in physical simulation of water waves. Result of simulation is visualized in real-time via 3D rendering of water surface. The hardware IP blocks, such as IVAHD, M4 cores, are not utilized for this demo.
Setup
In order to re-create the demo, user would need a standard AM572x GP EVM and Processor SDK Linux package. The demo is integrated into the Matrix GUI and can be launched by touching the “Video Analytics” icon on the LCD. The sources to the demo are packaged in the Processor SDK Linux Installer, under “example-applications” folder and can be compiled using the SDK’s top-level Makefile
Building Blocks
- Camera Capture: The camera module on AM572x GP EVM acquires color frames of 640x480 resolution. The images are received by the OpenCV framework using camera capture class, that depends on the standard V4L2 Linux driver (/dev/video1).
- Gesture Recognition: The first 30 frames captured are used to estimate the background, and later subtracted to extract the hand contour, using erode and dilute operations available in the OpenCV Library. Analysis of largest contour is performed to find convex hulls. Hand gesture classification is based on ratio of outer and inner contour. Several discrete values are sent to wave simulation algorithm.
- Wave Simulation: Wave simulation is done in two stages: calculation of initial (t=0)) Phillips spectrum followed by spectrum updates per each time instant. Height map is generated in both steps using 2D IFFT (of spectrum). The Gesture inputs are used to vary the wind direction for wave simulation
- Graphics Rendering: Finally, 2D vertex grid is generated with the above height map. Fragment rendering uses user-defined texture and height dependent coloring.
- Display: The displayed content includes - Camera feed, overlayed with the contour detection, and the generated water surface
Block diagram
Demo Internals
Programming Paradigm
- Code running on A15 Linux platform is written in C++ and links with QT5, OpenCV and OpenCL host side libraries.
- Code running on DSP C66x is written in OpenCL C
- Code running on GPU is written in GLSL.
- Standard V4L2 Linux driver is used for camera capture
- The demo uses OpenCV 3.1, OpenCL 1.2, OpenGL ES 2.0/GLSL and QT 5.5
OpenCV (running on ARM A15s)
Video analytics functionality includes simple algorithm to extract contours of hand, and detect how widely opened the hand is. A parameter which indicates ratio between convex hull and contours is used to control physical simulation of waves.This is an output argument converted to wind speed, in 2.5-10 ms range (4 discrete values). Initially image background is estimated (for 30 frames) using MOG2 (Mixture Of Gaussians), standard OpenCV algorithm. Later, the background is subtracted from camera frames, before morphological operations: erode and dilute are performed.Next two steps include contour detection (which is also presented in camera view window) and convex hull estimation. Ratio between outer and inner contour indicates (in 1.1-1.8 range) can be correlated with number of fingers and how widely are they spread. If they are more widely spread, parameter is converted to higher wind speed and waves become higher.
OpenCL (running on ARM A15s + C66x)
Wave surface simulation is based on generation of Phillips (2D) spectrum followed by 2D IFFT (256x256). Both operations are executed by OpenCL offload to single DSP core. Many details on this algorithm can be found in graphics.ucsd.edu/courses/rendering/2005/jdewall/tessendorf.pdf. This stage is controlled by wave speed (output of gesture detection algorithm) using fixed wind direction (an idea for improvement: wind direction can be controlled using hand gesture).
Height map in form of 256x256 float matrix is generated on output and used by OpenGL based vertex renderer (performed in next step). Wave surface simulation consists of two steps:
- initial setup defining starting conditions (wind speed and wind direction are used as input in this stage only)
- update of wave surface height map (Phillips spectrum modification generated at t=0, along time axe and 2D IFFT for each time step).
OpenGL ES (running on ARM A15s + GPU/SGX)
FLOW: 256x256 float height map matrix + fixed texture -> OpenGL ES based algorithm -> rendered frame buffers
OpenGL ES is a subset of Open GL for desktop devices. Important difference (for this project) is requirement to use vertex buffers and only triangle strips. Also Qt provides wrapper functions (QOpenGL functions) created with intention to hide differences between different OpenGL versions and also to slightly simplify programming. On the downside, it involves Qt specific syntax (not far from original OpenGL ES functions). Height Map data (256x256, but sub-sampled by 4x4, hence 64x64 vertices) received from previous stage, are rendered specific coloring and user supplied JPEG image. Fragment shader does mixing of texture and color derived from interpolated height giving more natural visualization. Currently lighting effects are not used (Implementing this can significantly improve the quality of rendering).
QT 5 (running on ARM A15)
FLOW: user input (mouse and keyboard) -> QT application -> windowing system and control of above threads
Directory Structure
The functionality is organized as shows in the files/description below.
| file name | description | |
| 1 | CameraConnectDialog.cpp/CameraConnectDialog.h | |
| 2 | CameraGrab.cpp/CameraGrab.h | Auxilliary camera frame acquisition functions to achieve full FPS |
| 3 | CameraView.cpp/CameraView.h | Major class instantiated after connecting to camera. This class creates processing thread, wavesimulation thread and also instantiates wave display (3D graphics) widget. |
| 4 | CaptureThread.cpp/CaptureThread.h | Input (camera) frame buffering. |
| 5 | FrameLabel.cpp/FrameLabel.h | |
| 6 | GeometryEngine.cpp/GeometryEngine.h | Height map mash creation, vertex updates |
| 7 | Gesture.cpp/Gesture.h | Hand gesture (OpenCV) detection algorith, |
| 8 | ImageProcessingSettingsDialog.cpp/ImageProcessingSettingsDialog.h | Settings of parameters used by image processing algorithms. |
| 9 | main.cpp | main function |
| 10 | MainWindow.cpp/MainWindow.h | |
| 11 | MatToQImage.cpp/MatToQImage.h | Conversion from OpenCV Mat object to QT QImage object |
| 12 | ProcessingThread.cpp/ProcessingThread.h | Main processing thread, frame rate dynamics, invokes variois image processing algorithms |
| 13 | SharedImageBuffer.cpp/SharedImageBuffer.h | |
| 14 | WaveDisplayWidget.cpp/WaveDisplayWidget.h | Wave surface 3D rendering (invokes methods from GeometryEngine.cpp) |
| 15 | WaveSimulationThread.cpp/WaveSimulationThread.h | Wave surface physical simulation thread - host side of OpenCL dispatch. |
| 16 | Buffers.h | |
| 17 | Structures.h | |
| 18 | Config.h | |
| 19 | phillips.cl | DSP OpenCL phillips spectrum generation kernels and 2D IFFT kernel (invoking dsplib.ae66 optimized 1D FFT). After compilation (by clocl) phillips.dsp_h is generated, and included in WaveSimulationThread.cpp (ocl kernels are compiled and downloaded in this thread, before run-time operation is started). |
| 20 | vshader.glsl | Vertex shader (gets projection matrix, position and texture position as input arguments; generates texture coordinate and height for fragment shader |
| 21 | fshader.glsl | Fragment shader doing linear interpolation of textures and mixing texture with height dependent color, and adds ambient light |
| 22 | shaders.qrc | Specify shader filenames |
| 23 | textures.qrc | Specify texture file (2D block which is linearly interpolated in fragment shader, using position arguments provided by vertex shader) |
| 24 | qt-opencv-multithreaded.pro | Top level QT make file: phi |
| 25 | ImageProcessingSettingsDialog.ui | User interface definition file for modification of algorithm parameters. |
| 26 | CameraView.ui | Camera view user interface definition file - right click mouse action brings up image processing algorithm selection |
| 27 | CameraConnectDialog.ui | |
| 28 | MainWindow.ui |
Performance
The hand gesture detection/wave surface simulation/wave surface rendering demo pipeline runs at 18-20 fps. For other algorithms (e.g. smoothing, canny) the pipeline runs at 33-35 fps.
Licensing
The demo code is provided under BSD/MIT License
FAQ/Known Issues
- Brighter lighting conditions are necessary for noise-free camera input, to allow good contour detection. In poor lighting conditions, there would be false or no detection.
- OpenCV 3.1 version shows low FPS rate for Camera Capture. Hence, a custom solution based on direct V4L2 ioctl() calls is adopted (cameraGrab.cpp file) to boost the FPS