5.3.6. ROS and Radar¶
5.3.6.1. Introduction¶
The ROS is meta-ros running on top of Linux. It is a collection of software libraries and packages to help you write robotic applications. Both mobile platforms and static manipulators can leverage wide colelction of open-source drivers and tools. ROS framework is mainly based on publisher-subscriber model, and in some cases server-client mode.
It is frequently the case that ROS based applications require sensors enabling interaction with the environment. Various types of sensors can be used: cameras, ultrasound, time-of-flight RGBD cameras, lidars, ...
In case of 3D sensors, typical output is point cloud. Consumer of this information (e.g. for navigation) is decoupled from point cloud producer since format is well defined. Due to modular nature of ROS it is easy to replace one sensor with the other as long as format of information (in this case point cloud) is the same.
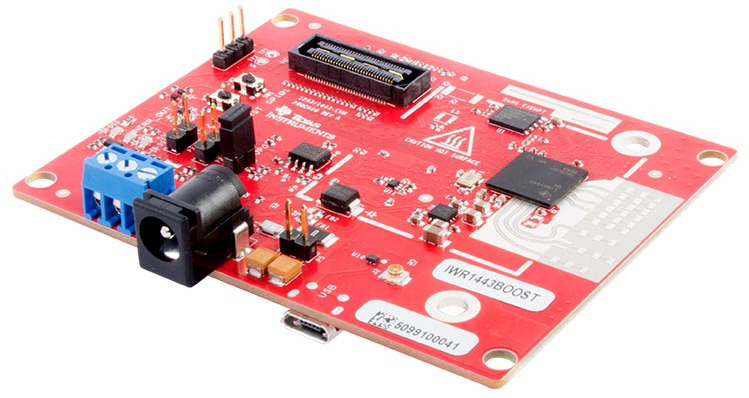
An important type of 3D sensor, especially suited for outdoor use cases is mmWave radar (77-81GHz). For this demo IWR/AWR-1443 or 1642 EVM is needed. It is connected to Sitara device over USB connection creating virtual UART.
Optionally to make this platform movable, Kobuki mobile base can be added. Sitara EVM and Radar EVM would be attached to Kobuki, and Sitara EVM running ROS would control Kobuki movement via USB connection. Please note that mobile base is not essentail for verification of ROS on Sitara plus Radar EVM operation.
It is desirable to have Ubuntu Linux box (typically Linux PC desktop or laptop) with Ubuntu 14.04LTS and ROS indigo installed (please note that ROS Indigo is natively supported in Ubuntu 14.04).
5.3.6.2. HW Setup¶
- USB to microUSB cable (connecting USB connector on Sitara side with microUSB connector on Radar EVM
- [optional] Kobuki mobile base (as used by Turtlebot2), http://kobuki.yujinrobot.com/
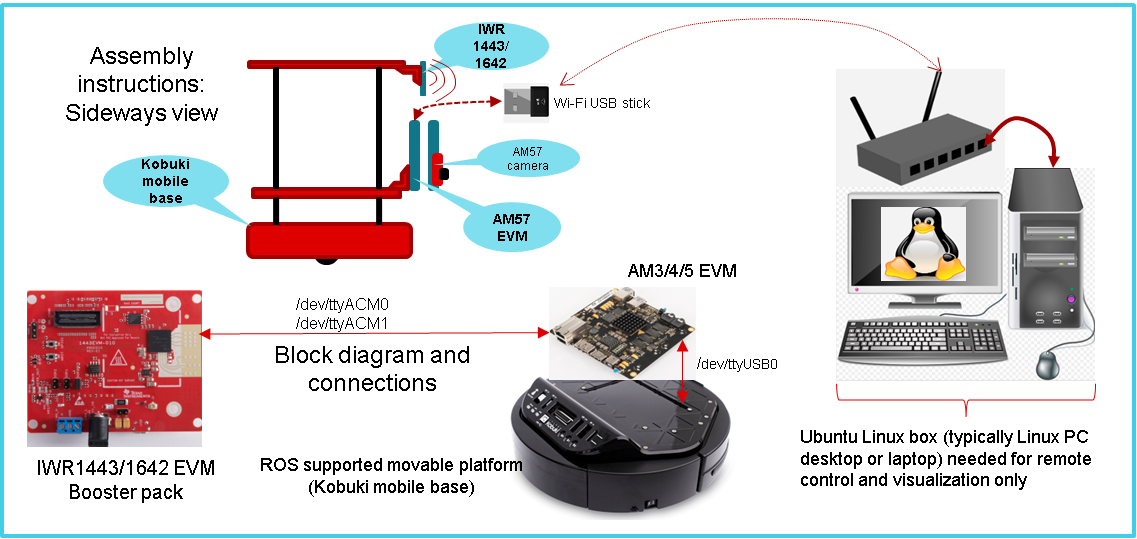
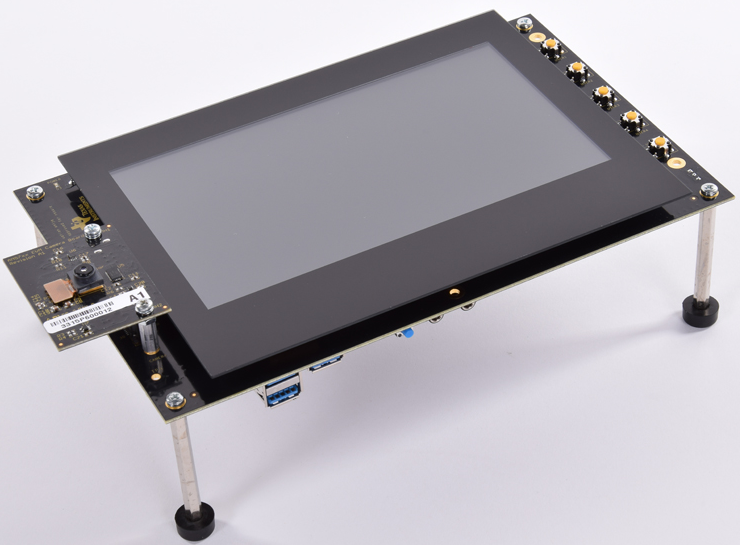
Fig. 5.6 Kobuki mobile base with Sitara, Radar EVMs and monitoring Ubuntu Linux box (PC desktop or laptop)
Compatibility
The ti_mmwave_rospkg ROS driver package on Sitara is tested with Processor Linux SDK which includes meta-ros layer, indigo, (from https://github.com/bmwcarit/meta-ros).
For visualization we use ROS indigo distro on Ubuntu Linux box, preffered for compatibility reasons. Run the commands below to install ROS indigo on Ubuntu Linux box. More details can be found from http://wiki.ros.org/indigo/Installation/Ubuntu.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'
wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install ros-indigo-desktop-full
For this demo, IWR EVM requires mmWave SDK firmware. If different firmware is used on Radar EVM, please follow procedure using UniFlash tool to install mmWave SDK.
5.3.6.3. ROS configuration verification¶
ROS is part of PLSDK 4.3 target filesystem, including mmWave ROS driver, so no additional installation steps are required. ROS is installed in /opt/ros/indigo folder. Only setting up configuration related to specific IP address of target EVM, and Ubuntu Linux box host IP address is needed. ROS is distributed meta-ros, with single ROS host acting as a broker for all internode transcations. It runs roscore node and in this case roscore is executed on Sitara. Ubuntu Linux box will only run ROS RViz node since RViz requires OpenGL desktop support (Sitara only supports OpenGL ES 2.0).
Note
If visualization using RViz is not needed, Ubuntu Linux box is not necessary for this demo (except to start multiple SSH terminals).
Reconfigure PLSDK for Python3
PLSDK includes ROS packages from meta-ros layer, compiled with Python3 support (build/conf/local.conf : ROS_USE_PYTHON3 = “yes”) As PLSDK default python setting is Python 2.7, filesystem update is required for ROS tests to run:
root@am57xx-evm:/usr/bin# ln -sf python3 python.python
root@am57xx-evm:/usr/bin# ln -sf python3-config python-config.python
5.3.6.4. ROS between distributed nodes (Sitara and Ubuntu Linux box)¶
1st SSH terminal, to Sitara EVM
Modify /opt/ros/indigo/setup.bash
export ROS_ROOT=/opt/ros/indigo
export PATH=$PATH:/opt/ros/indigo/bin
export LD_LIBRARY_PATH=/opt/ros/indigo/lib
export PYTHONPATH=/usr/lib/python3.5/site-packages:/opt/ros/indigo/lib/python3.5/site-packages
export ROS_MASTER_URI=http://$SITARA_IP_ADDR:11311
export ROS_IP=$SITARA_IP_ADDR
export CMAKE_PREFIX_PATH=/opt/ros/indigo
export ROS_PACKAGE_PATH=/opt/ros/indigo/share
touch /opt/ros/indigo/.catkin
Then, execute
source /opt/ros/indigo/setup.bash
roscore
2nd SSH terminal, to Sitara EVM
source /opt/ros/indigo/setup.bash
rosrun roscpp_tutorials talker
You will see log similar to following:
....[ INFO] [1516637959.231163685]: hello world 5295
[ INFO] [1516637959.331163994]: hello world 5296
[ INFO] [1516637959.431165605]: hello world 5297
[ INFO] [1516637959.531161359]: hello world 5298
[ INFO] [1516637959.631162807]: hello world 5299
[ INFO] [1516637959.731166207]: hello world 5300
[ INFO] [1516637959.831215641]: hello world 5301
[ INFO] [1516637959.931165361]: hello world 5302
[ INFO] [1516637960.031165019]: hello world 5303
[ INFO] [1516637960.131164027]: hello world 5304
3rd SSH terminal, to Linux BOX (Optional)
export ROS_MASTER_URI=http://$SITARA_IP_ADDR:11311
export ROS_IP=$LINUXBOX_IP_ADDR
source /opt/ros/indigo/setup.bash
rosrun roscpp_tutorials listener
You will see log similar to following:
...
data: hello world 5338
---
data: hello world 5339
---
data: hello world 5340
---
data: hello world 5341
---
data: hello world 5342
---
data: hello world 5343
---
data: hello world 5344
5.3.6.5. mmWave ROS node on Sitara and RViz on Ubuntu Linux box¶
1st SSH terminal, to Sitara EVM
Start roscore, only if it is not already started
source /opt/ros/indigo/setup.bash roscore
2nd SSH terminal, to Sitara EVM
source /opt/ros/indigo/setup.bash
roslaunch ti_mmwave_rospkg rviz_1443_3d.launch
Change "rviz_1443_3d.launch to "rviz_1642_2d.launch", based on Radar EVM type (1443 or 1642).
If Kobuki mobile is available, use the command below instead:
roslaunch ti_mmwave_rospkg plsdk_rviz_1443_3d.launch
Sample log is included:
source /opt/ros/indigo/setup.bash
roslaunch ti_mmwave_rospkg plsdk_rviz_1443_3d.launch
... logging to /home/root/.ros/log/97dfe396-2711-11e8-bd4a-a0f6fdc25c34/roslaunch-am57xx-evm-7487.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.0.222:35481/
SUMMARY
========
PARAMETERS
* /fake_localization/use_map_topic: True
* /mmWave_Manager/command_port: /dev/ttyACM0
* /mmWave_Manager/command_rate: 115200
* /mmWave_Manager/data_port: /dev/ttyACM1
* /mmWave_Manager/data_rate: 921600
* /mmWave_Manager/max_allowed_azimuth_angle_deg: 90
* /mmWave_Manager/max_allowed_elevation_angle_deg: 90
* /rosdistro: b'<unknown>\n'
* /rosversion: b'1.11.21\n'
NODES
/
fake_localization (fake_localization/fake_localization)
mmWaveQuickConfig (ti_mmwave_rospkg/mmWaveQuickConfig)
mmWave_Manager (ti_mmwave_rospkg/ti_mmwave_rospkg)
octomap_server (octomap_server/octomap_server_node)
static_tf_map_to_base_radar_link (tf/static_transform_publisher)
static_tf_map_to_odom (tf/static_transform_publisher)
ROS_MASTER_URI=http://192.168.0.222:11311
core service [/rosout] found
process[mmWave_Manager-1]: started with pid [7505]
process[mmWaveQuickConfig-2]: started with pid [7506]
process[static_tf_map_to_odom-3]: started with pid [7507]
process[static_tf_map_to_base_radar_link-4]: started with pid [7508]
[ INFO] [1520981858.224293205]: mmWaveQuickConfig: Configuring mmWave device using config file: /opt/ros/indigo/share/ti_mmwave_rospkg/cfg/1443_3d.cfg
process[octomap_server-5]: started with pid [7509]
process[fake_localization-6]: started with pid [7517]
[ INFO] [1520981858.367713151]: waitForService: Service [/mmWaveCommSrv/mmWaveCLI] has not been advertised, waiting...
[ INFO] [1520981858.436009564]: Initializing nodelet with 2 worker threads.
[ INFO] [1520981858.480256524]: mmWaveCommSrv: command_port = /dev/ttyACM0
[ INFO] [1520981858.480407967]: mmWaveCommSrv: command_rate = 115200
[ INFO] [1520981858.497923263]: waitForService: Service [/mmWaveCommSrv/mmWaveCLI] is now available.
[ INFO] [1520981858.498667137]: mmWaveQuickConfig: Ignored blank or comment line: '% ***************************************************************'
[ INFO] [1520981858.499059815]: mmWaveQuickConfig: Ignored blank or comment line: '% Created for SDK ver:01.01'
[ INFO] [1520981858.499462577]: mmWaveQuickConfig: Ignored blank or comment line: '% Created using Visualizer ver:1.1.0.1'
[ INFO] [1520981858.505357942]: mmWaveQuickConfig: Ignored blank or comment line: '% Frequency:77'
[ INFO] [1520981858.506164932]: mmWaveQuickConfig: Ignored blank or comment line: '% Platform:xWR14xx'
[ INFO] [1520981858.506843089]: mmWaveQuickConfig: Ignored blank or comment line: '% Scene Classifier:best_range_res'
[ INFO] [1520981858.507514414]: mmWaveQuickConfig: Ignored blank or comment line: '% Azimuth Resolution(deg):15 + Elevation'
[ INFO] [1520981858.508289684]: mmWaveQuickConfig: Ignored blank or comment line: '% Range Resolution(m):0.044'
[ INFO] [1520981858.508999398]: mmWaveQuickConfig: Ignored blank or comment line: '% Maximum unambiguous Range(m):9.01'
[ INFO] [1520981858.509816310]: mmWaveQuickConfig: Ignored blank or comment line: '% Maximum Radial Velocity(m/s):5.06'
[ INFO] [1520981858.510520982]: mmWaveQuickConfig: Ignored blank or comment line: '% Radial velocity resolution(m/s):0.64'
[ INFO] [1520981858.518476684]: mmWaveQuickConfig: Ignored blank or comment line: '% Frame Duration(msec):33.333'
[ INFO] [1520981858.519262364]: mmWaveQuickConfig: Ignored blank or comment line: '% Range Detection Threshold (dB):9'
[ INFO] [1520981858.519957764]: mmWaveQuickConfig: Ignored blank or comment line: '% Range Peak Grouping:disabled'
[ INFO] [1520981858.520157681]: mmWaveDataHdl: data_port = /dev/ttyACM1
[ INFO] [1520981858.520252841]: mmWaveDataHdl: data_rate = 921600
[ INFO] [1520981858.520315142]: mmWaveDataHdl: max_allowed_elevation_angle_deg = 90
[ INFO] [1520981858.520375654]: mmWaveDataHdl: max_allowed_azimuth_angle_deg = 90
[ INFO] [1520981858.520943849]: mmWaveQuickConfig: Ignored blank or comment line: '% Doppler Peak Grouping:disabled'
[ INFO] [1520981858.521671945]: mmWaveQuickConfig: Ignored blank or comment line: '% Static clutter removal:disabled'
[ INFO] [1520981858.522412729]: mmWaveQuickConfig: Ignored blank or comment line: '% ***************************************************************'
[ INFO] [1520981858.523396537]: mmWaveQuickConfig: Sending command: 'sensorStop'
[ INFO] [1520981858.533674630]: mmWaveCommSrv: Sending command to sensor: 'sensorStop'
[ INFO] [1520981858.536083724]: DataUARTHandler Read Thread: Port is open
[ INFO] [1520981858.548926257]: mmWaveCommSrv: Received response from sensor: 'sensorStop
Done
mmwDemo:/>'
[ INFO] [1520981858.550875817]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1520981858.551745758]: mmWaveQuickConfig: Sending command: 'flushCfg'
[ INFO] [1520981858.559882020]: mmWaveCommSrv: Sending command to sensor: 'flushCfg'
[ INFO] [1520981858.562726084]: mmWaveCommSrv: Received response from sensor: 'flushCfg
Done
mmwDemo:/>'
[ INFO] [1520981858.564378289]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1520981858.565240748]: mmWaveQuickConfig: Sending command: 'dfeDataOutputMode 1'
[ INFO] [1520981858.573026625]: mmWaveCommSrv: Sending command to sensor: 'dfeDataOutputMode 1'
[ INFO] [1520981858.576915985]: mmWaveCommSrv: Received response from sensor: 'dfeDataOutputMode 1
Done
mmwDemo:/>'
...
mmwDemo:/>'
[ INFO] [1520981858.776118886]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1520981858.776938726]: mmWaveQuickConfig: Sending command: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0'
[ INFO] [1520981858.782736816]: mmWaveCommSrv: Sending command to sensor: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0'
[ INFO] [1520981858.792102024]: mmWaveCommSrv: Received response from sensor: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
Done
mmwDemo:/>'
[ INFO] [1520981858.793846462]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1520981858.794657355]: mmWaveQuickConfig: Sending command: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2'
[ INFO] [1520981858.800233568]: mmWaveCommSrv: Sending command to sensor: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2'
[ INFO] [1520981858.806256139]: mmWaveCommSrv: Received response from sensor: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2
Done
mmwDemo:/>'
[ INFO] [1520981858.807890614]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1520981858.808687680]: mmWaveQuickConfig: Sending command: 'sensorStart'
[ INFO] [1520981858.814534734]: mmWaveCommSrv: Sending command to sensor: 'sensorStart'
[ INFO] [1520981858.822598283]: mmWaveCommSrv: Received response from sensor: 'sensorStart
Done
mmwDemo:/>'
[ INFO] [1520981858.824211611]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1520981858.824545077]: mmWaveQuickConfig: mmWaveQuickConfig will now terminate. Done configuring mmWave device using config file: /opt/ros/indigo/share/ti_mmwave_rospkg/cfg/1443_3d.cfg
[mmWaveQuickConfig-2] process has finished cleanly
3rd SSH terminal, to Sitara EVM
Bring up all ROS components for communicting and controlling Kobuki
source /opt/ros/indigo/setup.bash
roslaunch kobuki_node minimal.launch
4th SSH terminal, to Sitara EVM
Start Kobuki teleop console (remotely control Kobuki movement using keyboard)
source /opt/ros/indigo/setup.bash
roslaunch kobuki_keyop safe_keyop.launch
Operating kobuki from keyboard:
Forward/back arrows : linear velocity incr/decr.
Right/left arrows : angular velocity incr/decr.
Spacebar : reset linear/angular velocities.
d : disable motors.
e : enable motors.
q : quit.
5th SSH terminal, to Ubuntu Linux box
First, install ROS Indigo distribution on Ubuntu Linux box if it has not been done before.
Setup ROS variables on Ubuntu Linux box (to enable communication with ROS host on Sitara) then start RViz
export ROS_MASTER_URI=http://$SITARA_IP_ADDR:11311 (IP address of Sitara EVM, modify as needed)
export ROS_IP=$LINUX_BOX_IP_ADDR (IP address of Ubuntu Linux box, modify as needed)
source /opt/ros/indigo/setup.bash
rosrun rviz rviz
Alternatively, in order to get Kobuki avatar on the screen, install kobuki_description on Ubuntu Linux box and start RViz by launching view_model from kobuki_description.
git clone https://github.com/yujinrobot/kobuki
cd kobuki
cp -r kobuki_description /opt/ros/indigo/share
roslaunch kobuki_description view_model.launch
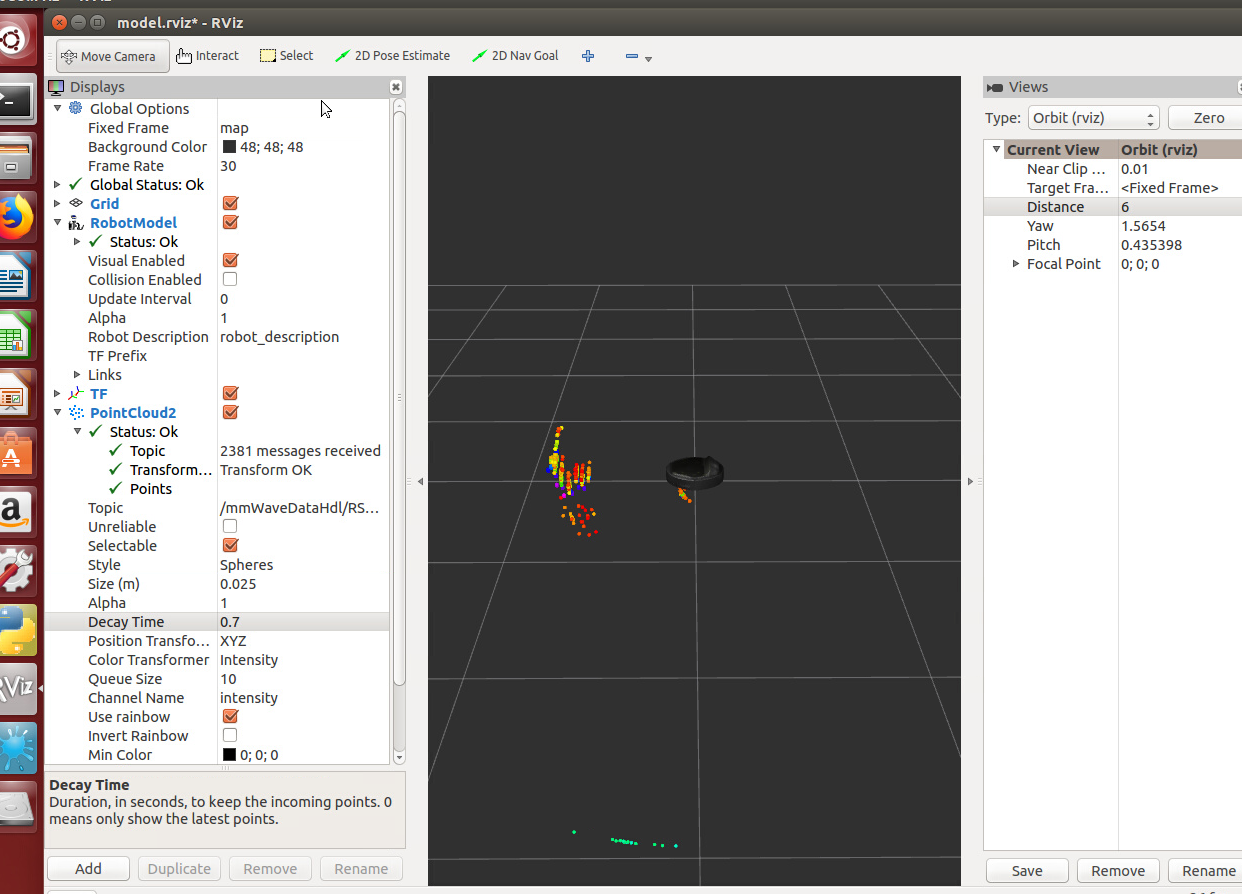
In RViz add point cloud from mmWave radar:
- Click Add->PointCloud2
- Select /mmWaveDataHdl/RScan from the Topic field dropdown for the PointCloud2 on the left hand panel
- Increase Size to 0.03, increase Decay Time to 0.25, and Select Style as “Spheres”.
- In rviz, select map for Fixed Frame in Global Options.
- If Kobuki is also started, set Reference Frame (left panel) to “map”.
You should see a point cloud image:
More information can be found in ROS driver document in chapters: “Visualizating the data”, “Reconfiguring the chirp profile”, and “How it works”
Starting GStreamer pipeline for streaming front view camer
It is possible to start GStreamer pipeline on Sitara and receive front-camera view on Ubuntu Linux box or Windows PC using VLC.
gst-launch-1.0 -e v4l2src device=/dev/video1 io-mode=5 ! 'video/x-raw, \
format=(string)NV12, width=(int)640, height=(int)480, framerate=(fraction)30/1' ! ducatih264enc bitrate=1000 ! queue ! h264parse config-interval=1 ! mpegtsmux ! udpsink host=192.168.0.100 sync=false port=5000
E.g. on Windows PC (192.168.0.100), you can watch the stream using: “Program Files (x86)VideoLANVLCvlc.exe” udp://@192.168.0.100:5000
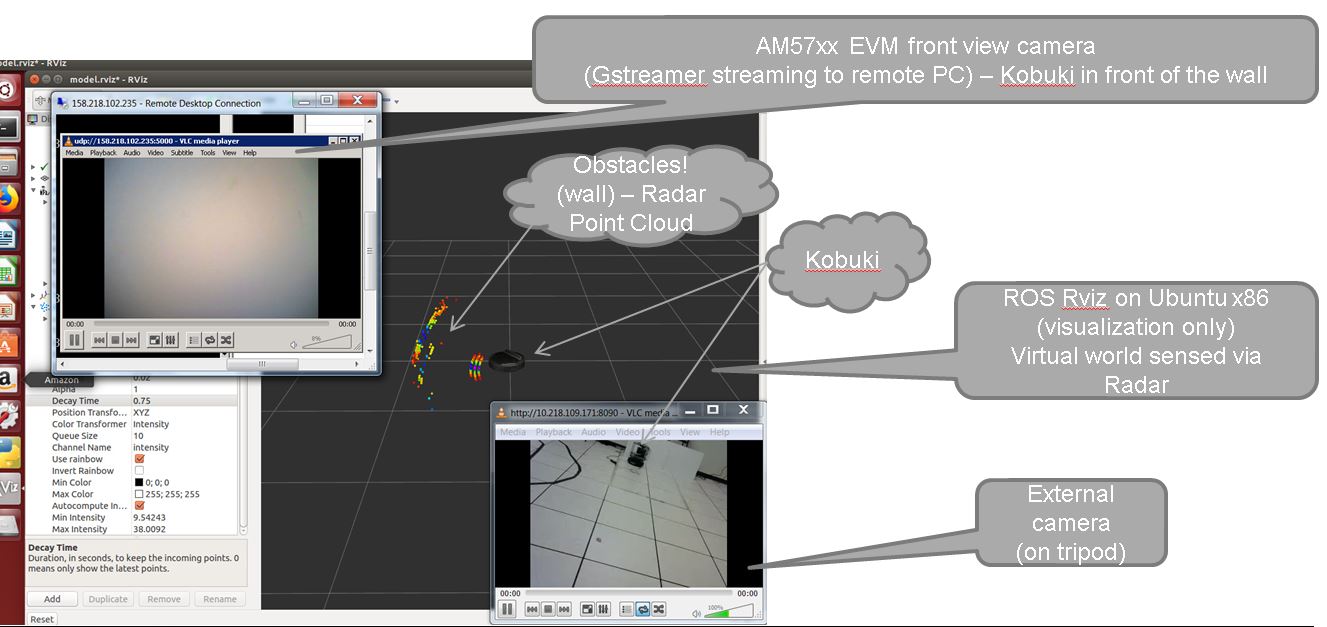
Fig. 5.7 Multiple windows on Ubuntu Linux box showing ROS RViz, front camera view and external camera view
5.3.6.6. Sense and Avoid Demo with mmWave and Sitara¶
Processor SDK Linux provides a complete sense and avoid navigation demo which runs on AM572x EVM with mmWave sensors. Details of this demo can be found from Autonomous robotics reference design with Sitara processors and mmWave sensors using ROS.