|
MCUSW
|
|
MCUSW
|
This document details AUTOSAR BSW ETH & ETHTRCV module implementations
The ETH module initializes, configures and controls the Gigabit Ethernet Switch (CPSW) in the J7xx device families as detailed in the AUTOSAR BSW ETH Driver Specification.
The ETHTRCV module initializes and configures the Ethernet transceiver (PHY) as detailed in the AUTOSAR BSW ETHTRCV Driver Specification.
Following section highlights key aspects of this implementation, which would be of interest to an integrator.
Please refer the ETH design page, which is included as part of release [3].
This ETH driver implementation supports the Gigabit Ethernet Switch (CPSW) peripheral present in the J7xx devices. The CPSW peripheral has an Ethernet port (port 1) which supports RGMII and RMII interfaces, and a host port (port 0) which supports the internal Communications Port Programming Interface (CPPI). The ETH driver uses the UDMA driver APIs to setup data transfers to/from the CPPI port.
The ETH driver implements single UDMA channel for data transmission and single channel (flow) for data reception. Only the CPSW default thread ID is enabled and configured according to the UDMA receive channel's default flow. Interrupts can be enabled for DMA transmit and receive completion events.
The DMA transfers are based on descriptors called Host Mode Packet Descriptors (HMPD). The descriptors are given to and retrieved from the UDMA via Ring Accelerators. There are three rings used per data direction in this implementation:
The depth of each ring as well as its associated memory is configurable. The ring memories can be any memory in the system, but it's recommended that they are placed in a fast memory (i.e. OCMRAM or MSMC3). The depth of these rings is determined by the number of TX and RX buffers set in the driver configuration (EthTxBufTotal and EthRxBufTotal).
Similarly, the HMPDs can be placed in any memory of the system, but it's recommended that they are placed in OCMRAM or MSMC3 as well.
The Management Data I/O interface (MDIO) of the CPSW peripheral is used by the ETH driver to implement the MII register read and write APIs which are ultimately used by the ETHTRCV driver to configure the Ethernet transceiver (PHY). The ETH driver handles the MDIO interrupt which indicates the completion event of the Ethernet transceiver register accesses.
The Address Lookup Engine (ALE) of the CPSW peripheral is used by the ETH driver to implement the receive filter API. The ALE provides 64 entries that can be used to set filter rules.
The Statistics submodule of the CPSW peripheral is used by the ETH driver to implement the statistics and drop count APIs.
The following table lists the mapping between Ethernet interrupts and the corresponding interrupt service routines.
| Interrupt Number | Description | Associated ISR |
|---|---|---|
| Configurable | DMA RX Completion | Eth_RxIrqHdlr_0 |
| Configurable | DMA TX Completion | Eth_TxIrqHdlr_0 |
| 35 | MDIO Access Completion | Eth_MdioIrqHdlr_0 |
The DMA interrupt numbers can be set via the Ethernet driver configuration parameters dmaTxChIntrNum and dmaRxChIntrNum.
There are 9 interrupts allocated for the MCU1_0 in this release, starting at interrupt number MCU0_INTR_NAVSS0_R5_0_PEND_0 + 10 (74). The interrupt numbers passed to the Ethernet driver configuration must be within that range, otherwise the interrupt allocation will fail while enabling the Ethernet controller.
Please refer to the UDMA Driver Resource Manager allocation for further details.
There are no interrupts in the ETHTRCV module.
The Eth Driver implementation in this release only supports the Pre-Compile variant. The driver expects generated Eth_Cfg.h and Eth_Cfg.c to be present at the locations specified in the Eth File Structure section.
Similarly, the EthTrcv Driver implementation only supports the Pre-Compile variant. The driver expects generated EthTrcv_Cfg.h and EthTrcv_Cfg.c to be present at the locations specified in the EthTrcv File Structure section.
This driver implementation doesn't support the Global Time APIs:
The current implementation doesn't support QoS feature in transmission and reception:
Priority pamareter should be set to 0 when requesting a buffer via Eth_ProvideTxBuffer().FifoIdx parameter should be set to 0 when receiving a buffer via Eth_Receive().The driver doesn't call Ethernet Switch Interface APIs.
The wake-up related APIs are not implemented in this release:
The wake-up related functionality of other non wake-up specific APIs (i.e. EthTrcv_TransceiverInit(), EthTrcv_SetTransceiverMode(), etc) are not implemented in this release either.
The current EthTrcv driver implementation only supports auto-negotiation mode. The following APIs are impacted and partial functionality of the API is implemented:
The following EthTrcv ECUC APIs are not implemented in this release:
None.
The Ethernet driver doesn't register any interrupt handlers (ISR), it is expected that consumer of this driver registers the required interrupt handler.
The Ethernet interrupts are:
Other CPSW interrupts (like the Statistics Pending interrupt) are not handled by the driver.
Please refer to the EthApp_InterruptConfig() function in Eth demo application for the implementation details of the interrupt registration.
The driver doesn't configure the functional clock and power for the Ethernet module. It is expected that the Secondary Bootloader (SBL) powers up the required modules. Please refer SBL documentation.
Please follow steps detailed in section (Build) to build library or example.
The GCC compiler is required to build the host-side application.
The steps to build the host-side application in Linux are listed below:
$ cd mcal_drv/mcal/examples/Eth/eth_app/host/ $ make
The Eth example application can run an internal loopback test when configured accordingly in the driver's configuration parameters.
The example application per se doesn't need any change for loopback, but the loopback parameter must be set to TRUE as shown below. The example application can then be rebuilt following the regular steps listed in Build.
diff --git a/mcal_drv/mcal/examples_config/Eth_Demo_Cfg/output/generated/src/Eth_Cfg.c b/mcal_drv/mcal/examples_config/Eth_Demo_Cfg/output/generated/src/Eth_Cfg.c
index 24c046a..21cf137 100755
--- a/mcal_drv/mcal/examples_config/Eth_Demo_Cfg/output/generated/src/Eth_Cfg.c
+++ b/mcal_drv/mcal/examples_config/Eth_Demo_Cfg/output/generated/src/Eth_Cfg.c
@@ -75,7 +75,7 @@ ETH_CONFIG_DATA_SECTION CONST(Eth_ConfigType, ETH_CONFIG_SECTION)
/**< MDIO bus clock (MDCLK) frequency (in Hz) */
.connType = ETH_MAC_CONN_TYPE_RGMII_FORCE_1000_FULL,
/**< MII connection type */
- .loopback = FALSE,
+ .loopback = TRUE,
/**< Loopback enable */
.enableCacheOps = (uint32)TRUE,
/**< Packet memory is cacheable */
In order to run the loopback test, it's required to set the Ethernet driver's 'loopback' configuration parameter to TRUE as described in Building the target-side example application in loopback mode. In loopback mode, CPSW is configured with ALE in bypass mode and loopback is enabled in the MAC port (port 1).
This test doesn't require any additional external setup and the example can run standalone on the device. The example application will transmit and receive 1000 frames, and will verify the frame content.
This test consists of two applications: host-side application that runs on a Linux machine, and a target-side application that is loaded to the device (DUT).
Please refer to the Building the host-side example application section for instructions to build the host-side application.
$ ifconfig -s
$ cd mcal_drv/mcal/examples/Eth/eth_app/host/ $ sudo ./EthHostApp -i eth2
The example applications on either side (host or target) will report a fail status if any test Ethernet frames is lost. So even frames which are lost due to physical link will cause the example application to report as a failure.
Note: The test steps listed above have been tested in Ubuntu 16.04. Test errors have been found when running the test in Ubuntu 18.04.
Various objects of this implementation (e.g. variables, functions, constants) are defined under different sections. The linker command file at (Examples Linker File (Select memory location to hold example binary)) defines separate section for these objects. When the driver is integrated, it is expected that these sections are created and placed in appropriate memory locations. (Locations of these objects depend on the system design and performance needs)
| Section | ETH_CODE | ETH_VAR | ETH_VAR_NOINIT | ETH_CONST | ETH_CONFIG | ETH_UDMA_RING | ETH_UDMA_DESC | ETH_TX_DATA | ETH_RX_DATA |
| ETH_TEXT_SECTION | USED | ||||||||
| ETH_ISR_TEXT_SECTION | USED | ||||||||
| ETH_CONST_32_SECTION | USED | ||||||||
| ETH_CONFIG_SECTION | USED | ||||||||
| ETH_DATA_INIT_UNSPECIFIED_SECTION | USED | ||||||||
| ETH_DATA_NO_INIT_UNSPECIFIED_SECTION | USED | ||||||||
| ETH_UDMA_RING_SECTION | USED | ||||||||
| ETH_UDMA_DESC_SECTION | USED | ||||||||
| ETH_TX_DATA_SECTION | USED | ||||||||
| ETH_RX_DATA_SECTION | USED |
| Section | ETHTRCV_CODE | ETHTRCV_VAR | ETHTRCV_VAR_NOINIT | ETHTRCV_CONST | ETHTRCV_CONFIG |
| ETHTRCV_TEXT_SECTION | USED | ||||
| ETHTRCV_CONST_32_SECTION | USED | ||||
| ETHTRCV_CONFIG_SECTION | USED | ||||
| ETHTRCV_DATA_INIT_UNSPECIFIED_SECTION | USED | ||||
| ETHTRCV_DATA_INIT_32_SECTION | USED | ||||
| ETHTRCV_DATA_NO_INIT_UNSPECIFIED_SECTION | USED | ||||
| ETHTRCV_DATA_NO_INIT_16_SECTION | USED |
This driver implementation has been validated with cache enabled. For optimal performance it's recommended to place (Memory Mapping) sections in cache enabled memory area.
The Ethernet driver supports ring and descriptor memory placement in non-cached memory. It's configurable through the following parameters:
EthRingInCachedMem - Cache management operations will be performed in ring memory only if this parameter is set.EthDescInCachedMem - Cache management operations will be performed in descriptor memory only if this parameter is set.Cache management operations refer to invalidate, write-back and write-back invalidate calls.
This implementation depends on the DET in order to report development errors and can be turned OFF. Refer to the Development Error Reporting section for detailed error codes.
This implementation requires 1 level of exclusive access to guard critical sections. Invokes SchM_Enter_Eth_ETH_EXCLUSIVE_AREA_0(), SchM_Exit_Eth_ETH_EXCLUSIVE_AREA_0() to enter critical section and exit.
In the example implementation (SchM_Eth.c), all the interrupts on CPU are disabled. However, disabling of the enabled Ethernet related interrupts should suffice.
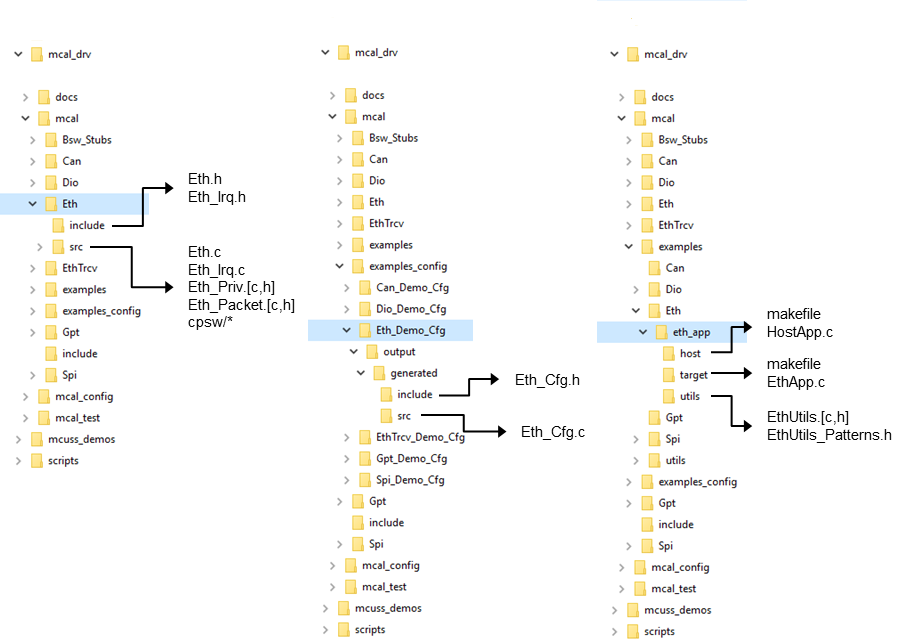
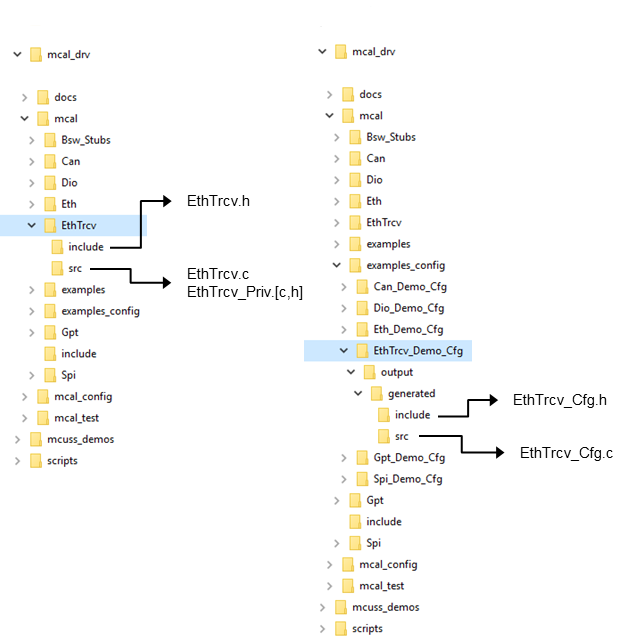
Development errors are reported to the DET using the service Det_ReportError(), when enabled. The driver interface files (Eth.h and EthTrcv.h shown in the driver directory structure of the File Structure section) lists the service IDs.
Production error are reported to DET via Det_ReportError(). Only the error codes in the Ethernet and Ethernet Transceiver driver specifications are reported which are listed below. There are no implementation specific error codes being reported.
| Type of Error | Related Error code | Value (Hex) |
| Invalid controller index | ETH_E_INV_CTRL_IDX | 0x01 |
| Eth module was not initialized | ETH_E_UNINIT | 0x02 |
| Invalid pointer in parameter list | ETH_E_PARAM_POINTER | 0x03 |
| Invalid parameter | ETH_E_INV_PARAM | 0x04 |
| Initialization failure | ETH_E_INIT_FAILED | 0x05 |
| Invalid mode | ETH_E_INV_MODE | 0x06 |
| Type of Error | Related Error code | Value (Hex) |
| Invalid transceiver index | ETHTRCV_E_INV_TRCV_IDX | 0x01 |
| EthTrcv module was not initialized | ETHTRCV_E_NOT_INITIALIZED | 0x02 |
| Invalid pointer in parameter list | ETHTRCV_E_PARAM_POINTER | 0x03 |
| Initialization failure | ETHTRCV_E_INIT_FAILED | 0x04 |
Production error are reported to DEM via the service DEM_ReportErrorStatus(). There are no implementation specific error codes being reported. Only the error codes in the Ethernet and Ethernet Transceiver driver specifications are reported which are listed below.
| Type of Error | Related Error code |
| Ethernet Controller Access Failure | ETH_E_ACCESS |
| Ethernet Frames Lost | ETH_E_RX_FRAMES_LOST |
| CRC Failure | ETH_E_CRC |
| Frame Size Underflow | ETH_E_UNDERSIZEFRAME |
| Frame Size Overflow | ETH_E_OVERSIZEFRAME |
| Frame Alignment Error | ETH_E_ALIGNMENT |
| Single Frame Collision | ETH_E_SINGLECOLLISION |
| Multiple Frame Collision | ETH_E_MULTIPLECOLLISION |
| Late Frame Collision | ETH_E_LATECOLLISION |
| Type of Error | Related Error code |
| Ethernet Transceiver Access Failure | ETHTRCV_E_ACCESS |
The AUTOSAR BSW Eth Driver specification details the APIs [1].
The Global Time APIs are not implemented in this release. Refer to the Ethernet Global Time APIs section for more details.
The AUTOSAR BSW EthTrcv Driver specification details the APIs [2].
The wake-up related APIs are not implemented in this release. Refer to the Ethernet Transceiver Wake-Up section for more details on impacted APIs.
The wake-up related functionality of other non wake-up specific APIs (i.e. EthTrcv_TransceiverInit(), EthTrcv_SetTransceiverMode(), etc) are not implemented in this release either.
The current EthTrcv driver implementation only supports auto-negotiation mode. Refer to the Ethernet Transceiver Manual/Auto-Negotiation Mode section for more details on the impacted APIs.
The following EthTrcv ECUC APIs are not implemented in this release. Refer to Ethernet Transceiver ECUC section for more details.
The example application demonstrate use of Eth module. The example consists of an application that runs on the J7200/J721E device (DUT) and an application that runs on a Linux PC (host). The host and target (DUT) applications communicate with each other to start the different stages of the example tests.
The Eth example relies on shared utils which provide helper functions (i.e. filling an Ethernet frame with test data, verifying frame contents, etc) which are useful on the DUT and host sides.
The following table summarizes the different tests implemented by the example application.
| Test ID | Summary | Description |
| test_0001 | Basic DUT frame reception | Host will send 1000 Ethernet frames, the DUT will receive and verify that the frame content matches the expected patterns |
| test_0002 | Basic DUT frame transmission | The DUT will send 1000 non-VLAN tagged frames without TX confirmation. The host PC will check that all frames are received and that the frame content matches the expected patterns |
| test_0003 | External loopback | The DUT will send frames to the host, the host will receive the frames and will send them back to the DUT |
| test_0004 | Default filter operation | Host will send 500 frames with DUT's MAC address and 500 frames with other MAC address. The DUT will reject the 500 frames that don't matches DUT's address |
| test_0005 | Different filter configurations | This test is split in different stages that will exercise different filter operations like adding/removing unicast address, entering/exiting promiscuous mode, etc. |
| test_0006 | DUT frame transmission with confirmation | The DUT will send 1000 non-VLAN tagged frames and will request TX confirmation. The host PC will check that all frames are received and that the frame content matches the expected patterns |
| test_0007 | Transmission of VLAN tagged frames | The DUT will send 1000 VLAN tagged frames and will request TX confirmation. The host PC will check that all frames are received and that the frame content matches the expected patterns |
| test_0008 | Transmission of different frame lengths | The DUT will send non-VLAN tagged frames of different lengths, including short frames. The host PC will check that all frames are received and that the frame content matches the expected patterns |
| test_0009 | VLAN tagged frame reception | Host will send 1000 VLAN tagged Ethernet frames, the DUT will receive and verify that the frame content matches the expected patterns |
| test_0010 | Controller mode changes | The application will set the controller to DOWN mode and then back to ACTIVE mode. Ethernet frame transmission and reception tests will be run afterwards. 10 iterations of these steps will be executed. |
| test_0100 | Transmit throughput | DUT transmit throughput is measured over 150,000 Ethernet frames sent from the host PC. |
| test_0200 | Internal loopback (MAC) | The DUT will send and receive 1000 Ethernet frames and will check the frame correctness against expected patterns. Note: This test runs only when Ethernet driver configuration's loopback mode is enabled |
The following list identifies key steps performed by the DUT side application:
EthApp_test_0200 will run only when loopback is enabled via Ethernet driver configuration. All other tests will not run. Conversely, when loopback is disabled EthApp_test_0200 will not run.
The host application steps are not presented in this guide, but can be found documented in the host side code. Please refer to the File Structure section for the directory where the HostApp.c file can be found.
The configuration files are present can be found at the directories shown in the File Structure section.
Eth Application Starts MAC Port 1 Address: 50:51:a9:fb:f4:2e EthTrcv mode: ACTIVE EthTrcv link state: Up EthTrcv baud rate: 1000Mbps EthTrcv duplexity: Full EthIf_TrcvModeIndication: Active ----------------------------------------------------------- test_0001: START test_0001: received 1000 of 1000 frames test_0001: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0002: START test_0002: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0003: START test_0003: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0004: START test_0004: received 500 of 500 frames test_0004: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0005: START test_0005: Null: Exp1: exp 500, got 500 test_0005: Null: Exp2: exp 0, got 0 test_0005: Ucast: Exp1: exp 500, got 500 test_0005: Ucast: Exp2: exp 500, got 500 test_0005: Mcast: Exp1: exp 500, got 500 test_0005: Mcast: Exp2: exp 500, got 500 test_0005: Mcast: Exp1: exp 500, got 500 test_0005: Mcast: Exp2: exp 0, got 0 test_0005: Bcast: Exp1: exp 500, got 500 test_0005: Bcast: Exp2: exp 500, got 500 test_0005: Null: Exp1: exp 500, got 500 test_0005: Null: Exp2: exp 0, got 0 test_0005: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0006: START test_0006: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0007: START test_0007: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0008: START test_0008: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0009: START test_0009: received 1000 of 1000 frames test_0009: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0010: START EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END EthIf_CtrlModeIndication: DOWN EthIf_CtrlModeIndication: ACTIVE test_0002: START test_0002: END test_0001: START test_0001: received 1000 of 1000 frames test_0001: END test_0010: completed 10 of 10 iterations test_0010: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0100: START test_0100: 150000 frames sent, 0 buffer underflows test_0100: END Test Result: Pass ----------------------------------------------------------- ---------------------------- Controller 0 Statistics ---------------------------- Drop Events : 0 Octets : 229322384 Packets : 1002 Bcast Packets : 1 Mcast Packets : 0 CRC/Align Errors : 0 Undersized Packets: 0 Oversized Packets : 0 Fragments : 0 Jabbers : 0 Collisions : 0 ---------------------------- Controller 0 Drop Counters ---------------------------- Buffer overruns : -1 CRC errors : 0 Undersize packets : 0 Oversized packets : 0 Alignment errors : 0 SQE errors : 0 Discarded inbound : 0 Erroneous inbound : 0 Discarded outbound: 0 Erroneous outbound: 0 Single collision : 0 Multiple collision: 0 Deferred transm : 0 Late collisions : 0 Excessive colls : 0 Buffer underrun : 0 Carrier-sense : 0 ETH Stack Usage: 1936 bytes Eth Application Completed
$ sudo ./EthHostApp -i enp3s0f1 Interface : enp3s0f1 MAC address : 00:15:17:2e:94:57 Waiting for DUT.. DUT detected: 50:51:a9:fb:f4:2e ----------------------------------------------------------- test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0002: START test_0002: received 1000 of 1000 frames test_0002: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0003: START test_0003: looped back 1000 frames test_0003: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0004: START test_0004: completed 500 of 500 iterations test_0004: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0005: START test_0005: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0006: START test_0006: received 1000 of 1000 frames test_0006: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0007: START test_0007: received 1000 of 1000 frames test_0007: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0008: START test_0008: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0009: START test_0009: transmitted 1000 of 1000 frames test_0009: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0010: START test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0002: START test_0002: received 1000 of 1000 frames test_0002: END test_0001: START test_0001: transmitted 1000 of 1000 frames test_0001: END test_0010: completed 10 of 10 iterations test_0010: END Test Result: Pass ----------------------------------------------------------- ----------------------------------------------------------- test_0100: START receiveTput: received 150000 frames in 1.85 secs (81280.81 frames/s, 984.42 Mbps) test_0100: END Test Result: Pass
| Id | Platform | Limitation |
|---|---|---|
| ETHFW-1534 | J7200 | Packet loss can occur with ports in QSGMII board due to a board limitation. This may affect a successful execution of the EthVirtmac test application. |
| Sl No | Specification | Comment / Link |
|---|---|---|
| 1 | AUTOSAR 4.3.1 | AUTOSAR Specification for Eth Driver Internet Link |
| 2 | AUTOSAR 4.3.1 | AUTOSAR Specification for EthTrcv Driver Internet Link |
| 3 | - | Design Page (Eth Design Document) |
| Revision | Date | Author | Description | Status |
|---|---|---|---|---|
| 0.1 | 08 Oct 2018 | Misael Lopez | First version | Pending Review |
| 0.2 | 22 Oct 2018 | Misael Lopez | Addressed review comments | Approved |
| 0.3 | 30 Nov 2018 | Misael Lopez | Updated UDMA interrupt information | Pending Review |
| 0.4 | 06 Dec 2018 | Misael Lopez | Updating Status | Approved |
| 0.5 | 16 Oct 2019 | Sujith S | Updates profile numbers for release 01.00.00 | Approved |
| 0.6 | 29 May 2020 | Misael Lopez | Updated for AUTOSAR 4.3.1 | Approved |
 1.8.15
1.8.15