|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
This application demonstrates J7 LDC (Lens Distortion Correction) and SDE (Stereo Depth Engine) HWAs. This application rectifies left and right inputs using the LDC and the SDE estimates disparity map from the recftified left and right inputs. Two different disparity estimation modes are supported in this application. One is a single-layer SDE mode, which outputs the raw disparity map from the SDE without post processing. The other is a mulit-layer SDE refinement mode, which combines the disparity map from the SDE at different layers with post processings. Up to 3 layers are supported and these are configuarable.
The application makes use of the below application libraries,
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
Shown below is the overall application data flow.
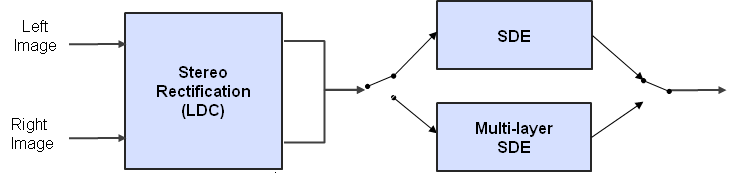
Application data flow |
Shown below is the data flow of the mulit-layer SDE refinement.
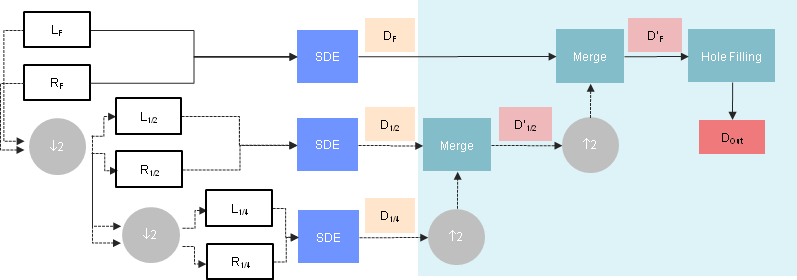
Multi-layer SDE data flow |
Shown below is the example output by the single-layer SDE.
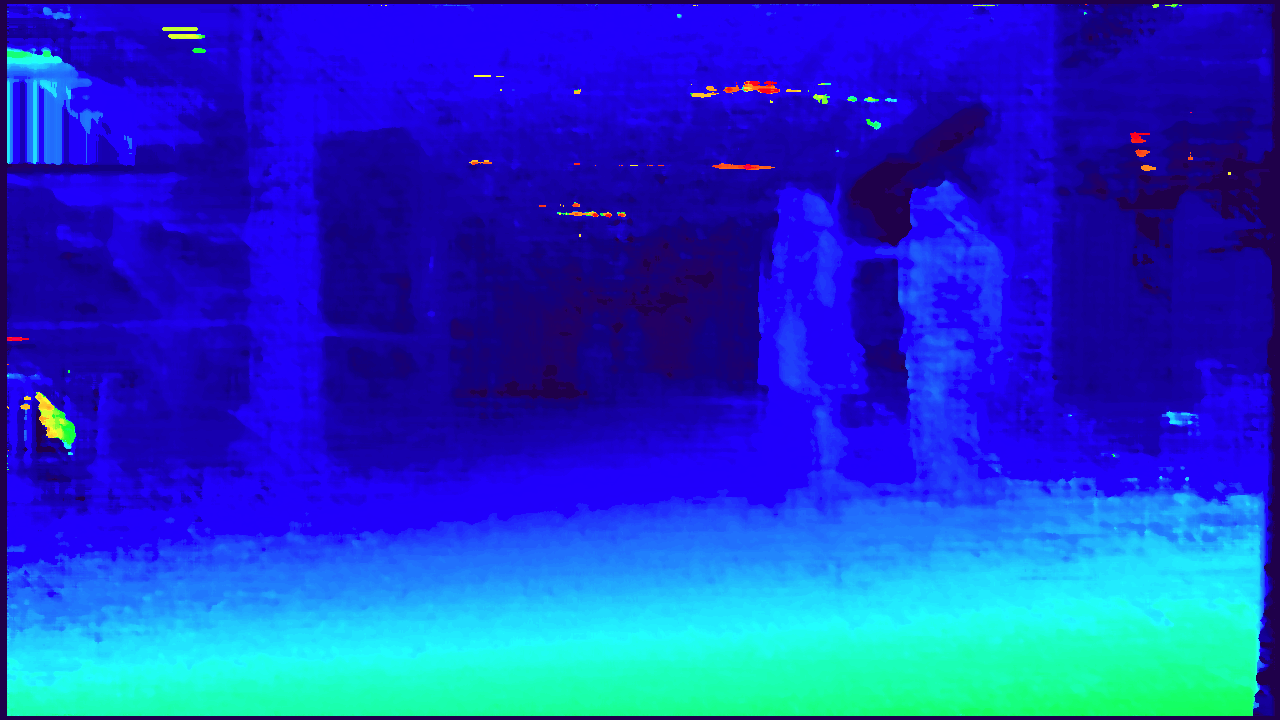
SDE Output |
Shown below is the example output by the multi-layer SDE refinement.

Multi-layer SDE refinement Output |
 1.8.15
1.8.15