|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
This applib provides a suite of functions to improve the quality of SDE disparity map. First, the LDC (Lens Distortion Correcdtion) HWA rectifies input stereo images. Then the rectified images are down-sampled to smaller resolutions by the MSC Scalers. The stereo pair at each layers are provided to the SDE (Stereo Depth Engine) HWAs to produce the disparity maps at different resolutions. Then the low-resolution disparity map is up-sampled and merged with the high-resolution disparity map. The merged disparity map is further processed by hole filling algorithm. Note that this applib supports up to 3 layers including the original layer.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
Shown below is data flows for Multi-layer (2-layer) SDE refinement.
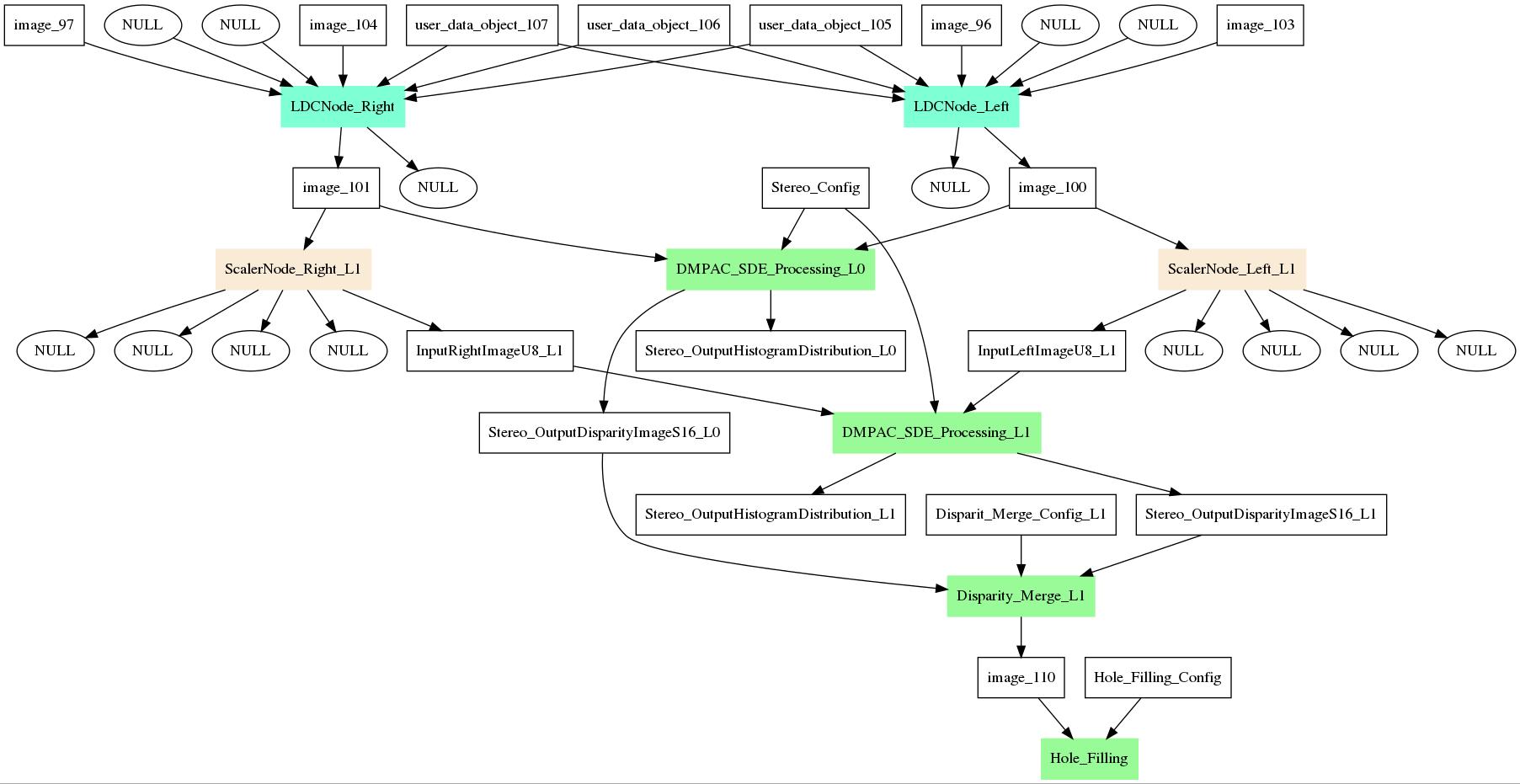
Multi-layer (2-layer) SDE refinement data flow |
 1.8.15
1.8.15