|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
This applib provides a suite of functions to estimate disparity map from input stereo images. First, the LDC (Lens Distortion Correcdtion) HWA rectifies input stereo images. Then the SDE (Stereo Depth Engine) HWA produces the disparity map from them.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
Shown below is data flows for SDE.
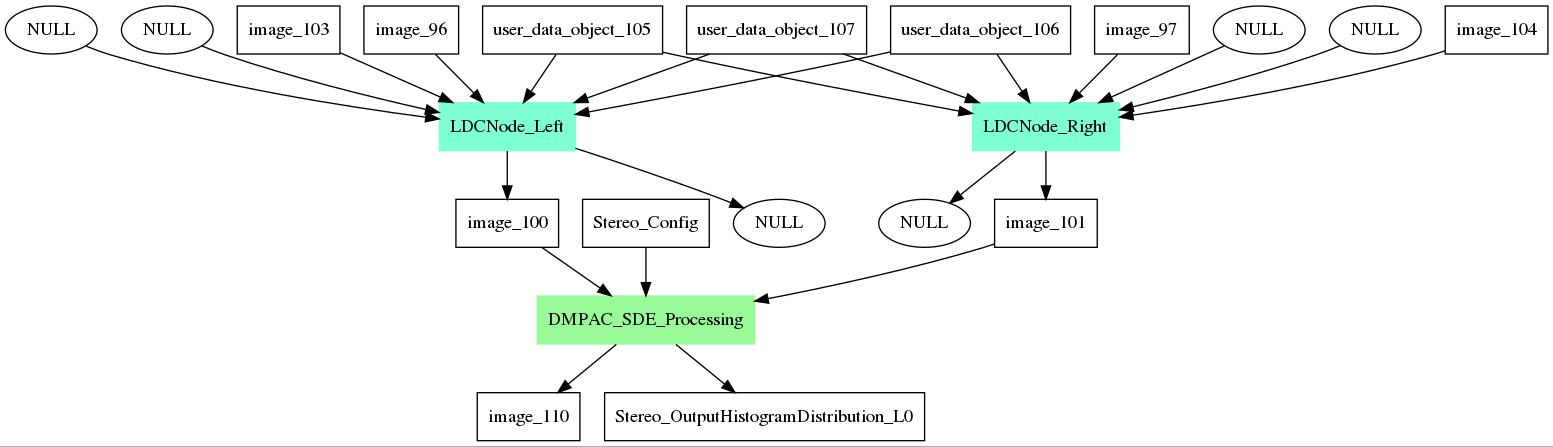
SDE data flow |
 1.8.15
1.8.15