Depth and Motion Perception Demos¶
The TDA4VM-SK hosts Depth and Motion hardware accelerator pack called DMPAC which consists of Dense Optical Flow accelerator which can provide dense flow vector map for upto 2MP resolution at 60fps and Stereo Disparity Engine which can provide disparity values for upto 2MP resolution at 30fps. Below are example GStreamer pipelines demonstrating the usage of both.
Dense Optical Flow¶
The below pipeline shows basic functionality of the tiovxdof gstreamer element
which uses TI’s Dense Optical Flow (DOF) accelerator on the SOC
gst-launch-1.0 \
v4l2src io-mode=2 device=/dev/video2 ! image/jpeg, width=1280, height=720 ! \
jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! \
tiovxpyramid ! application/x-pyramid-tiovx, format=GRAY8 ! tee name=split ! \
queue ! tiovxdof name=dof ! tiovxdofviz ! kmssink sync=false \
split. ! tiovxdelay delay-size=1 ! dof.delayed_sink
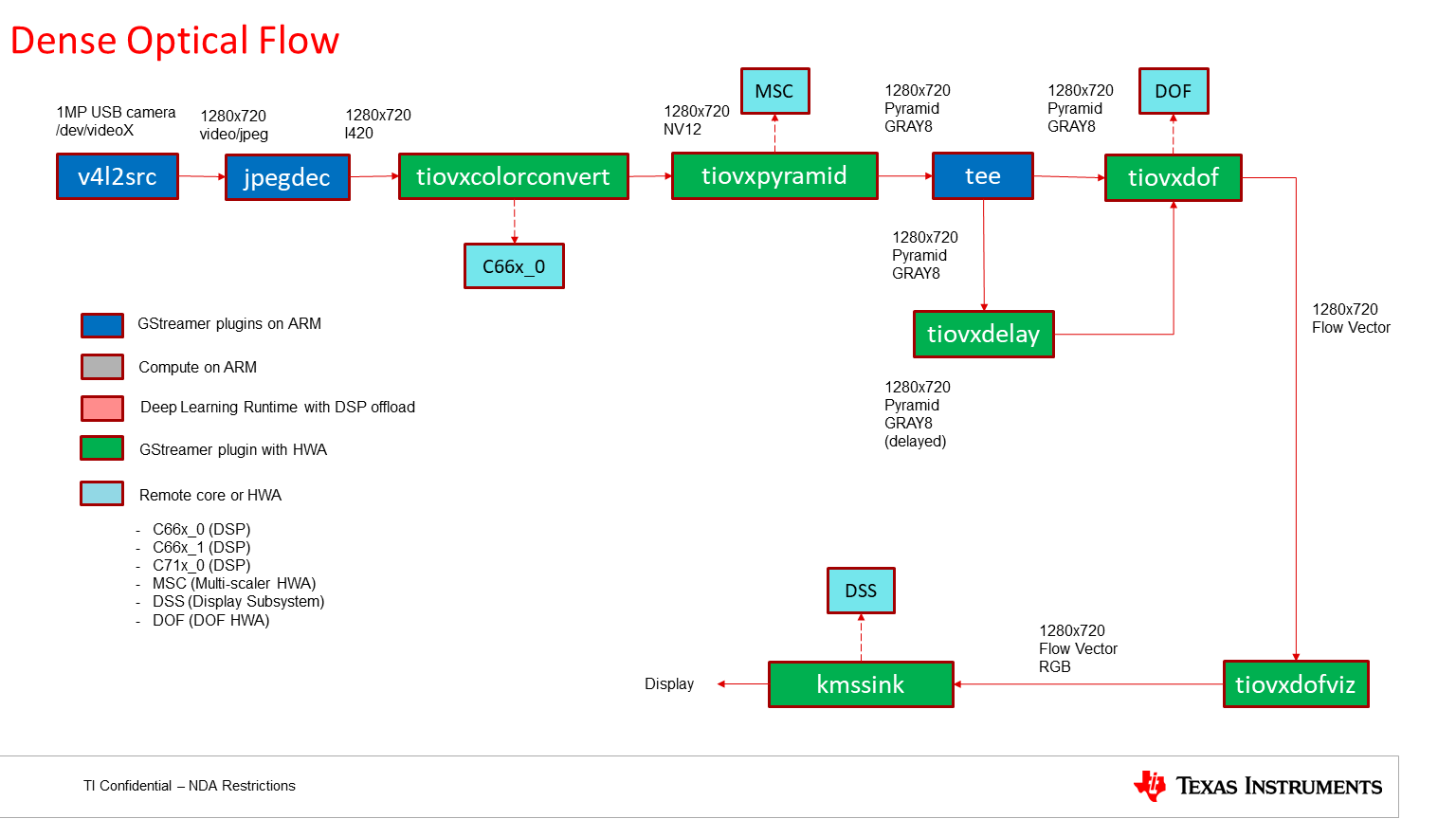
Fig. 23 GStreamer based data-flow pipeline for DOF demo¶
Stereo Disparity¶
The below pipeline shows basic functionality of the tiovxdof gstreamer element
which uses TI’s Stereo Disparity Engine (SDE) accelerator on the SOC
gst-launch-1.0 \
filesrc location=/opt/edge_ai_apps/data/videos/left-1280x720.avi ! \
avidemux ! h264parse ! v4l2h264dec ! \
video/x-raw, format=NV12 ! queue ! sde.left_sink \
filesrc location=/opt/edge_ai_apps/data/videos/right-1280x720.avi ! \
avidemux ! h264parse ! v4l2h264dec ! \
video/x-raw, format=NV12 ! queue ! sde.right_sink \
tiovxsde name=sde ! tiovxsdeviz ! kmssink sync=false
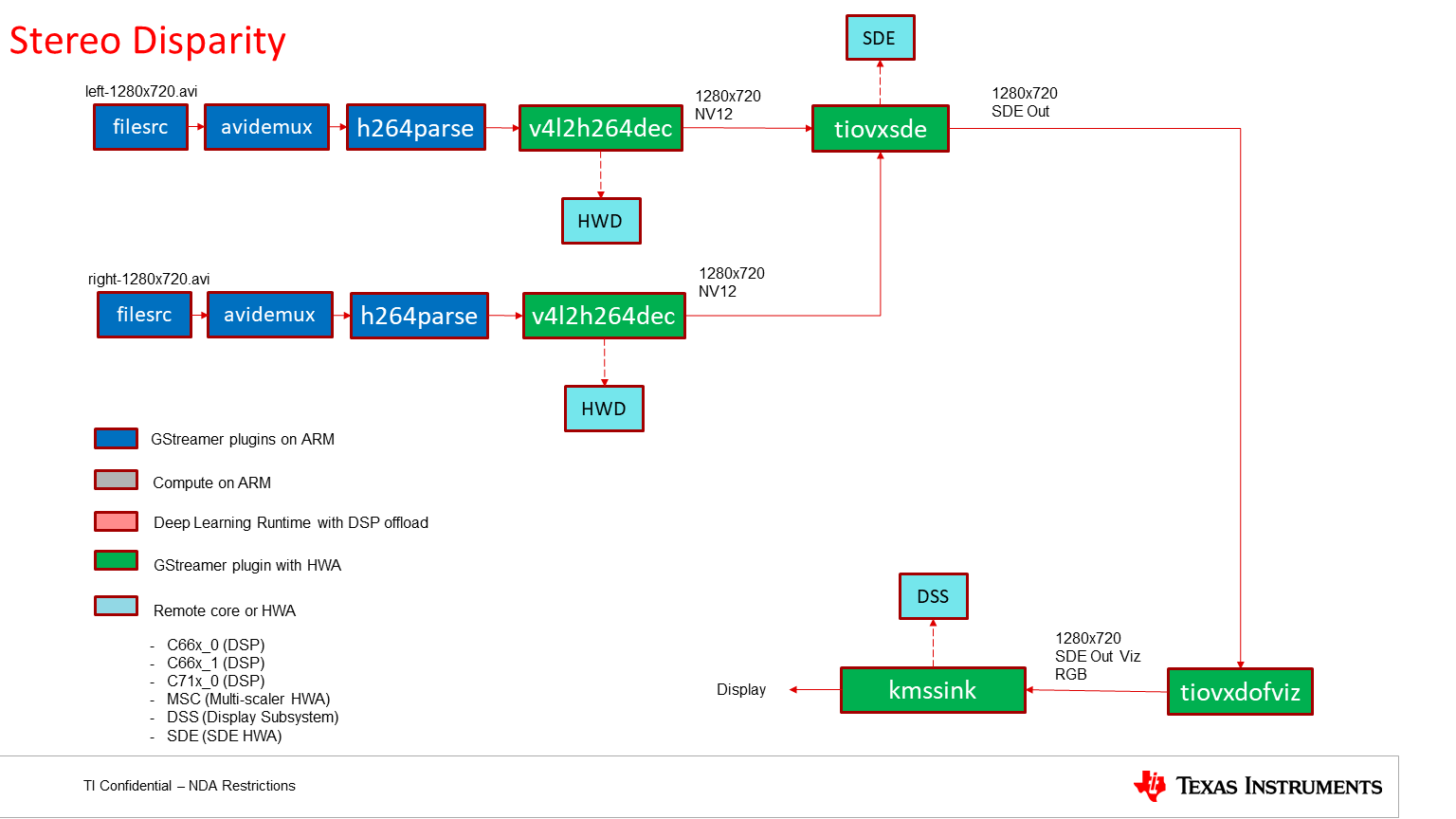
Fig. 24 GStreamer based data-flow pipeline for SDE demo¶