3.5.3.1. RemoteProc¶
Introduction

The host processor on TI’s Sitara family of devices is an ARM Cortex-A processor. Typically the ARM core is running Linux based on the Processor SDK Linux. TI has developed custom pruss and pru_rproc (PRU Subsystem Remote Processor) drivers which will plug into this kernel. This provides an interface for the kernel to load firmware into the PRU core(s) and provides basic control such as start and halt.
What do we need Linux to do?
The following is a list of services that Linux needs to provide in order to enable the PRU cores:
Load firmware into the PRU cores
Control PRU execution (start, stop, etc.)
Manage resources (memory, interrupt mappings, etc.)
All of these services are provided through a combination of the pruss, and pru_rproc Linux drivers that TI provides in the Processor SDK Linux.
Remoteproc
Overview
Remoteproc is a framework that allows the ARM host processor(s) to load firmware into PRU cores, start the PRU cores, stop the PRU cores, and configure resources that the PRUs might need during their execution (such as configuring the PRUSS INTC module and providing shared buffers in DDR memory for message passing). The next section will discuss the process that happens when the remoteproc module loads the PRU cores with a firmware. Most of this happens transparently to the user when the pruss and pru_rproc modules are inserted but an understanding of the concepts below should help users to better understand how to debug problems with remoteproc should they arise.
Load Procedure
This section will walk through each step that the drivers takes as they load firmwares into the PRU cores and then run them.
Step 0

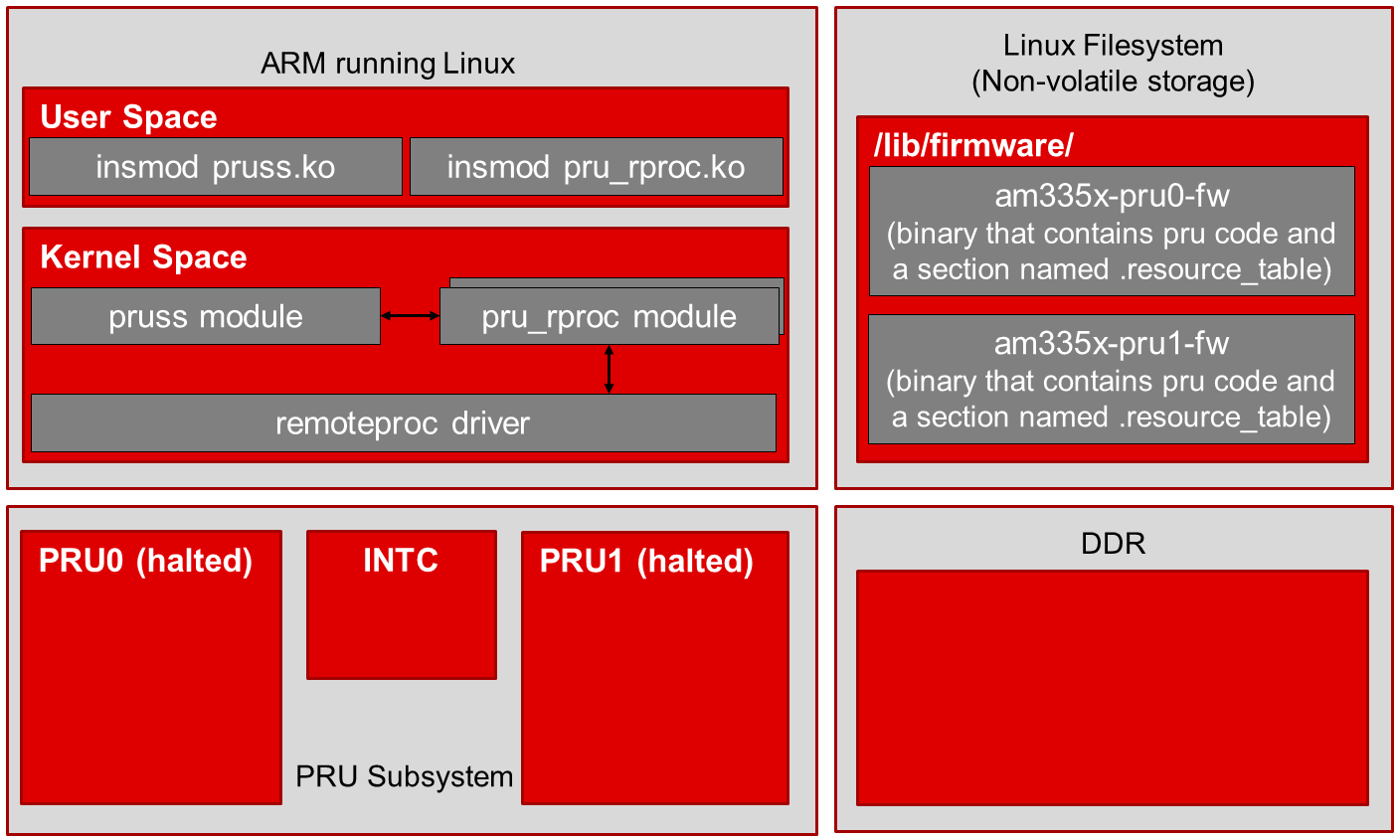
The four blocks in the image to right represent: The ARM core running Linux, the Linux filesystem where the PRU firmware binaries are initially stored, the PRU subsystem, and DDR memory. This image shows the initial state of the system before the pruss_remoteproc module is inserted.
Remoteproc driver is included as a kernel driver. This is a core remoteproc driver that provides the load/run/halt/etc API to other more specific remoteproc drivers.
A sysfs interface is also exposed to User Space to start/stop the PRU cores as well as specify the firmware file to load.
The sysfs interface is found at /sys/class/remoteproc/remoteprocN/ (e.g. remoteproc1 is PRU0 and remoteproc2 is PRU1 on the AM335x device (remoteproc0 is the M3 core used for power management functions)).
PRU firmware binaries exist in the filesystem in the /lib/firmware/ directory.
Step 1
echo 'am335x-pru0-fw' > /sys/class/remoteproc/remoteproc1/firmwareecho 'am335x-pru1-fw' > /sys/class/remoteproc/remoteproc2/firmwareecho 'start' > /sys/class/remoteproc/remoteproc1/stateecho 'start' > /sys/class/remoteproc/remoteproc2/stateStep 2
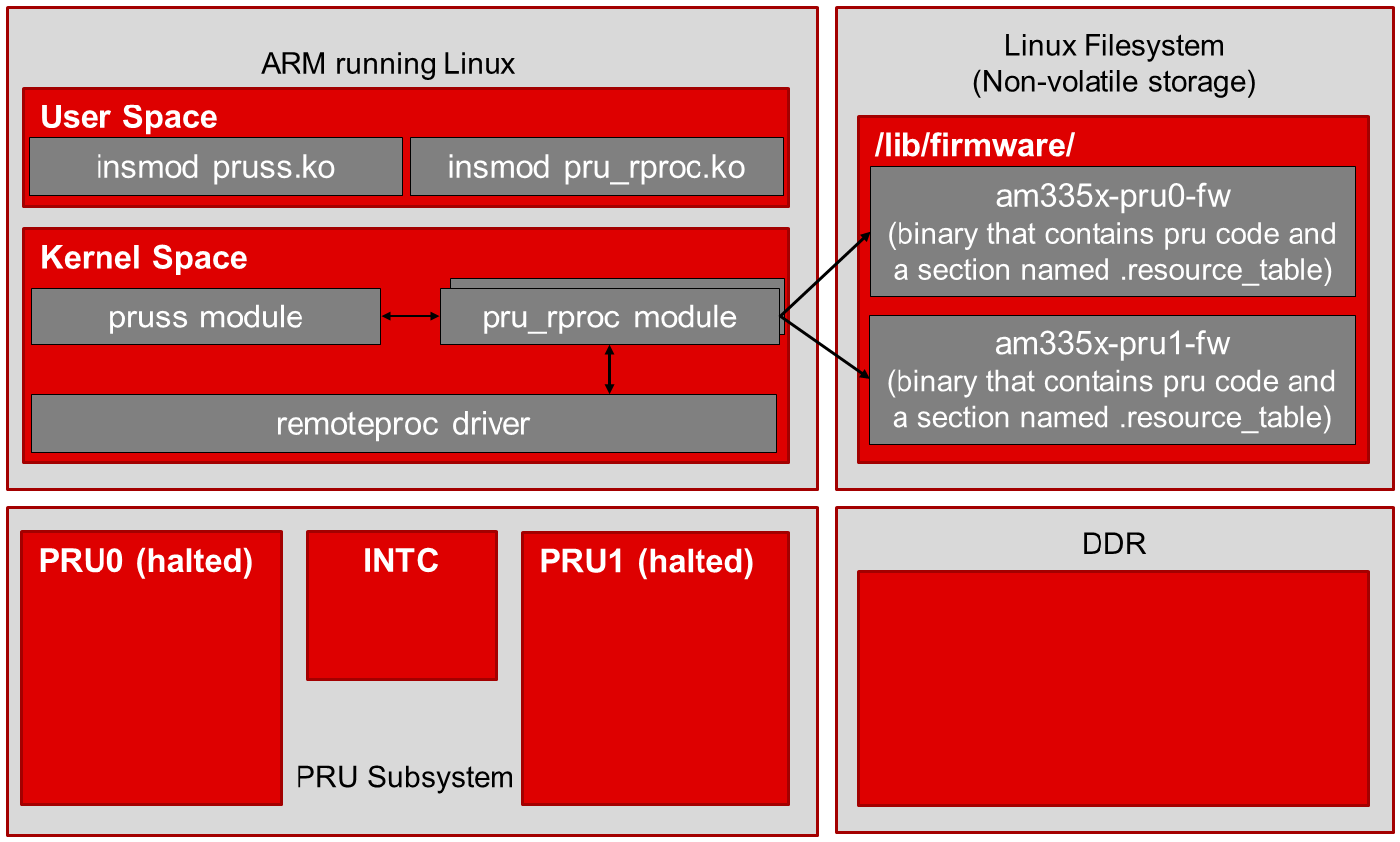
The pru_rproc module verifies two things before it proceeds with the firmware loading process.
The pru_rproc modules checks for the existence of PRU firmware binaries in the filesystem (as specified by the firmware entry in the sysfs in step 1 above)
These binaries must be located in the /lib/firmware/ directory
am335x-pru0-fw and am335x-pru1-fw are the default names used for the AM335x device but any name can be used as long as the firmware exists in /lib/firmware/
The pru_rproc module also parses the firmware binaries looking for a section named .resource_table
This .resource_table section of the firmware specifies the system resources that the PRUs will need during their program execution
Step 3

The pru_rproc module configures all of the resources that are being requested by the firmwares
In this case, that includes creating vrings in DDR memory for communication as well as setting up the interrupt mapping in the PRU subsystem INTC module
Step 4

Step 5
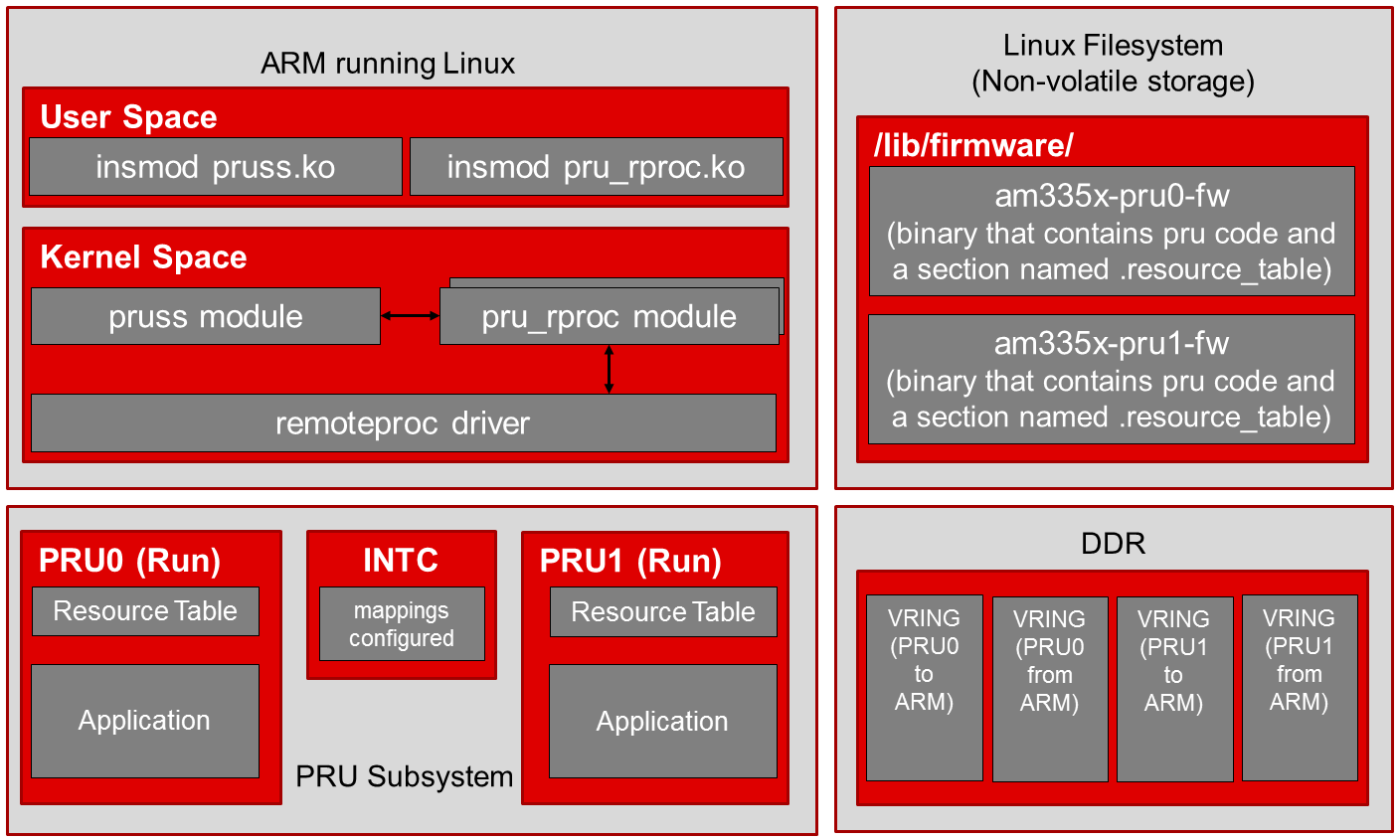
Now that everything is configured and the application code is in place, the pru_rproc module instructs the PRU cores to begin execution.