|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
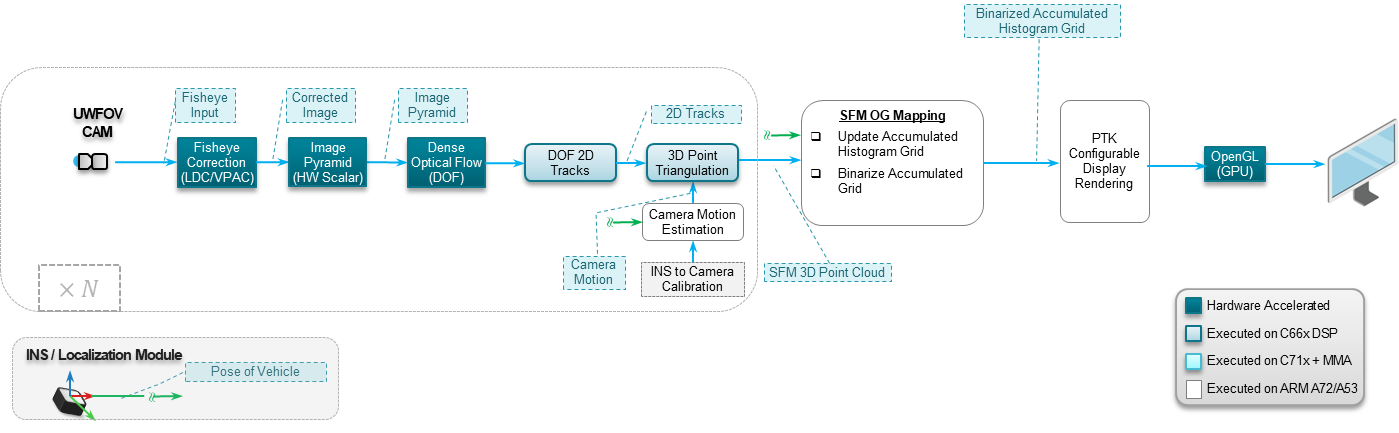
This application shows a Structure from Motion (SfM) approach for generating occupancy grid maps indicating free space versus occupied space around vehicle. It performs Structure from Motion on a sequence of images from a fisheye camera, but can also be applied to regular camera frames. Structure from Motion is a computer vision method for reconstructing the 3D scene as a point cloud from consecutive images in a process called triangulation. The created 3D point cloud are processed to create a occupancy grid map with free space and parking space around the vehicle.
The input to this application is a sequence of fisheye distortion corrected images that was pre-computed from the fishey images. Another input is INS (Inertial Navigation System) data of the vehicle to compute camera poses required for triangulation.
The application makes use of the below application libraries,
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
 1.8.15
1.8.15