|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
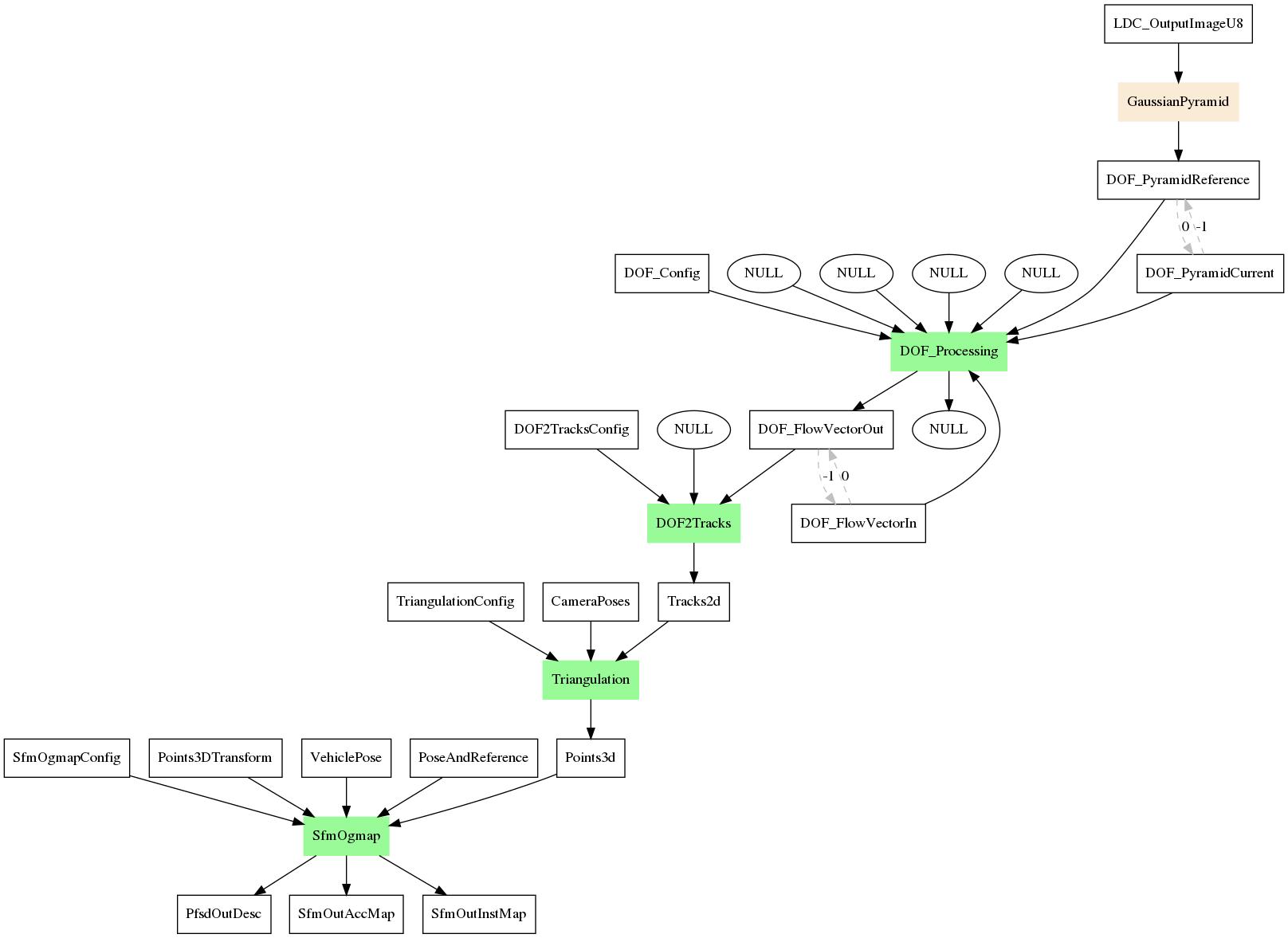
This applib provides a suite of functions to create and process 3D points into a world-fixed map indicating free space and parking free space around the vehicle. The applib creates 3D points using Structure from Motion (SfM) from a sequence of a fisheye camera images. But a sequence of regular camera images can be used. The applib also uses INS (Inertial Navigation System) data of the vehicle to compute camera poses required for SfM and to determine the location of the vehicle in the mapping process.
From the occupancy grid map produced by SfM OG Mapping Node, the applib also determines large free space in the current map, and searches for free space resembling a parking gap.
The DOF (Dense Optical Flow) node creates dense optical flow from a sequence of images. The DOF2Tracks node converts DOF into 2D tracks and Triangulation computes a 3D point in the camera reference frame for each 2D track. In the default configuration of this app, it is assumed that DOF was computed on the fisheye-corrected images (using LDC), so fisheye correction is not needed in DOF2Tracks Node. Given the generated 3D points, SFM OG Map node generates the occupancy grid map and also determined free space and parking space.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
 1.8.15
1.8.15