|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
This application generates a dynamic occupancy grid map indicating free space versus occupied space around the vehicle, using automotive grade Velodyne Lidar. Dempster- shafer algorithm is employed for handling the dynamics in the scene. The generated OGMAP is then used as input to a parking/free space detection algorithm block to generate a final map with different regions (free space parkable free space) marked. Localization of the vehicle in the maps is provided by an Inertial Navigation System (INS) combining GPS (Global Positioning System) and IMU (Inertial Measurement Unit).
The application makes use of the below application libraries,
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
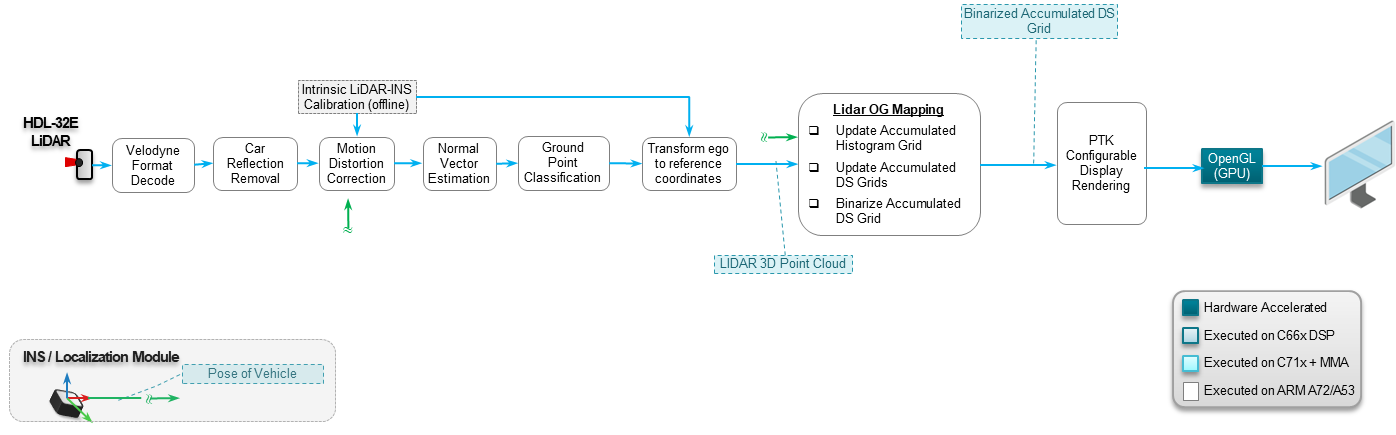
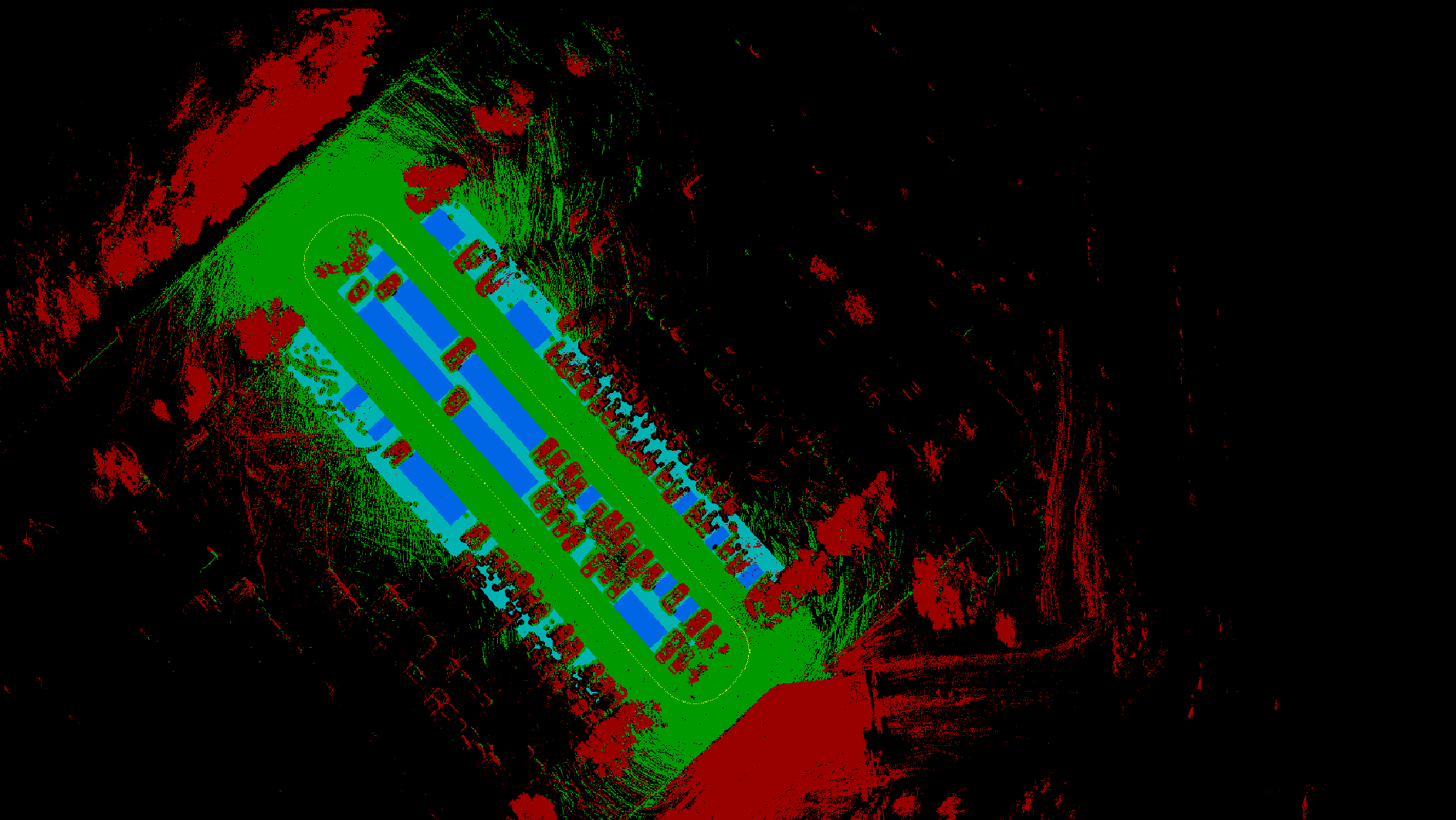
Shown below is an example output visualization showing the Lidar DS OGMAP.
 1.8.15
1.8.15