|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
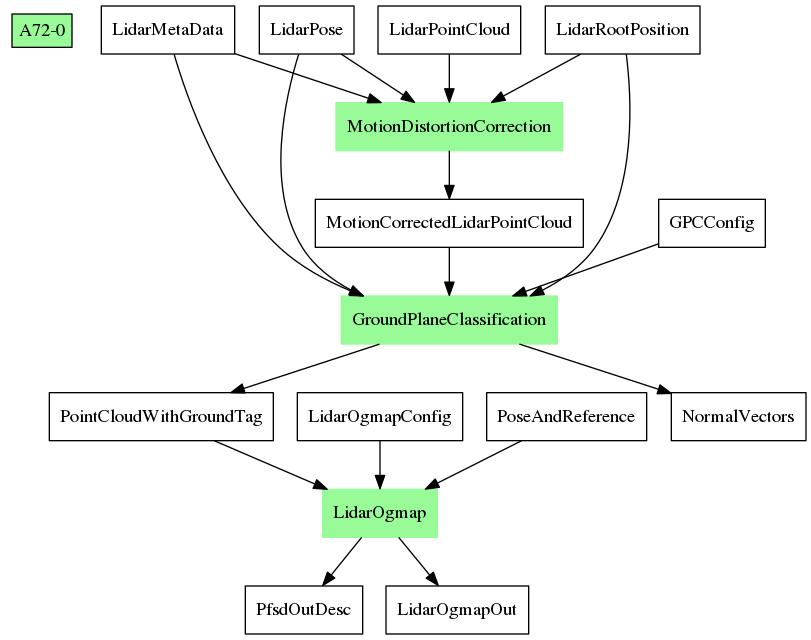
This applib processes lidar point clouds using Motion Distortion Correction (MDC) and Ground Plane Classification (GPC) to populate a world-fixed map indicating free space around the vehicle. Apart from raw lidar data, the applib requires INS (Inertial Navigation System) data of the vehicle as an input to determine the location of the vehicle in the mapping process. From the occupancy grid map produced by Lidar Ogmap Node, the applib also determines large free space in the current map, and searches for free space resembling a parking gap.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
 1.8.15
1.8.15