3.2.2.5. MCAN¶
Introduction
The Controller Area Network is a serial communications protocol which efficiently supports distributed real-time control with a high level of security. The MCAN module supports bitrates up to 5 Mbit/s and is compliant to the ISO 11898-1:2015. The core IP within M_CAN is provided by Bosch.
This wiki page provides usage information of M_CAN Linux driver.
Setup Details
TI board List
SoC |
Board |
Number of Instances |
Connection Type |
Enabled by default |
|---|---|---|---|---|
Dra76x |
EVM |
1 |
Header |
Yes |
AM654x |
IDK |
2 |
DB9 |
Yes |
AM64x |
EVM |
2 |
Header |
Yes |
AM62x |
SK |
3 |
Header |
No |
J721E |
EVM |
4 |
Header |
Yes |
J7200 |
EVM |
4 |
Header |
Yes |
J721S2 |
EVM |
5 |
Header |
Yes |
J784S4 |
EVM |
6 |
Header |
Yes |
Table: Boards M_CAN Driver is Validated on
Connection Configuration
|
|
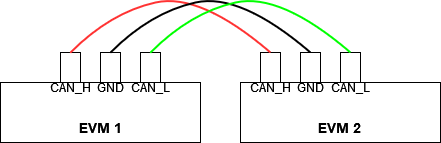
Header to Header |
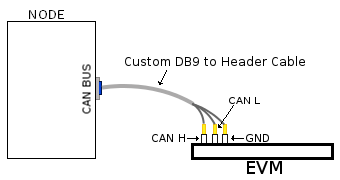
Header to DB9 |
Table: Various MCAN EVM Connection Configuration
Equipment
Female DB9 Cable
For boards exposing M_CAN using male DB9 connectors, a female connector is required. The other side can be male or female depending on the other CAN device the user connects to.

Jumper Wires
For boards where the CAN pins are broken out via a header, female jumper cables will be ideal for connection. The CAN pins will be CAN H (typically pin 1 of the header), GND (middle pin of the header) and CAN L (lowest pin on the header). The pinout in the header might vary across different boards and users must consult the board’s schematic to verify this.

Custom DB9 to Header Cable
Typically CAN devices use a DB9 connection therefore for boards whose CAN pins are broken out via a header it is helpful to create a header to DB9 connector cable. This custom cable is simple to make. Either a male or female DB9 connector (not cable) must be obtained along with three female jumper wires.
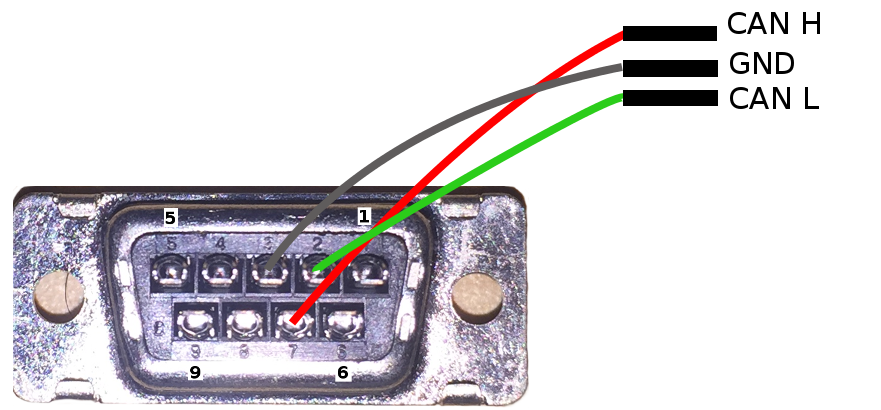
Snip one end of each of the jumper wires and expose some of the wiring. Now solder each of the exposed wires to pin 7 (CAN H), pin 2 (CAN L) and pin 3 (GND). Make sure your soldering on the side of the DB9 that has the metal lip meant to push some of the exposed wire into and soldering to the correct pins correctly. Use the below diagram as a reference.
|

|
Wiring Diagram |
Example of completed cable. |
CAN Utilities
There may be other userspace applications that can be used to interact with the CAN bus but the SDK supports using Canutils which is already included in the sdk filesystem.
Note
These instructions are for mcu_mcan0. If the board has multiple CAN instances enabled then they can be referenced by their CAN dts node names just like mcu_mcan0 here. For example, 2nd instance of CAN in the main domain ( ie main_mcan2 as referenced in the dts ) will be visible as main_mcan2 to the users.
Quick Steps
Initialize CAN Bus
Set bitrate
$ ip link set mcu_mcan0 type can bitrate 1000000
CAN-FD mode
$ ip link set mcu_mcan0 type can bitrate 1000000 fd on
CAN-FD mode with bitrate switching
$ ip link set mcu_mcan0 type can bitrate 1000000 dbitrate 4000000 fd on
Start CAN Bus
Device bring up
Bring up the device using the command:
$ ip link set mcu_mcan0 up
Transfer Packets
Cansend
Used to generate a specific can frame. The syntax for cansend is as follows:
<can_id>#{R|data} for CAN 2.0 frames
<can_id>##<flags>{data} for CAN FD frames
Some examples:
Send CAN 2.0 frame
$ cansend mcu_mcan0 123#F00DCAFE
Send CAN FD frame
$ cansend mcu_mcan0 113##2AAAAAAAA
Send CAN FD frame with BRS
$ cansend mcu_mcan0 143##1AAAAAAAAA
Cangen
Used to generate frames at equal intervals. The syntax for cangen is as follows:
cangen [options] <CAN interface>
Some examples:
Full load test with polling, 10 ms timeout
$ cangen mcu_mcan0 -g 0 -p 10 -x
b. fixed CAN ID and length, inc. data, canfd frames with bitrate switching
$ cangen mcu_mcan0 -g 4 -I 42A -L 1 -D i -v -v -f -b
Candump
Candump is used to display received frames.
candump [options] <CAN interface>
Example:
$ candump mcu_mcan0
Note: Use Ctrl-C to terminate candump
Further options for all canutils commands are available at https://git.pengutronix.de/cgit/tools/canutils
Stop CAN Bus
Stop the can bus by:
$ ip link set mcu_mcan0 down
Note
The earlier CAN naming convention had can0 referring to the first probed CAN instance and can1, can2.. and so on, to the other CAN instances in the order in which they are probed. For example, 2 CAN instances will have names as can0 and can1 assigned to them in the linux kernel, based on the order in which they are probed and irrespective of their CAN instance number. If the earlier CAN naming convention is needed, you can revert cfc97aeb022ddc03f252deebc9021aff449b24c8 commit in meta-arago repository.