

|
|
GPIO driver implementation for CC26xx/CC13xx devices.
============================================================================
The GPIO header file should be included in an application as follows:
Refer to GPIO.h for a complete description of the GPIO driver APIs provided and examples of their use.
In order to use the GPIO APIs, the application is required to provide 3 structures in the ti_drivers_config.c file:
#include <stdint.h>#include <ti/drivers/GPIO.h>#include <ti/devices/DeviceFamily.h>#include <DeviceFamily_constructPath(driverlib/ioc.h)>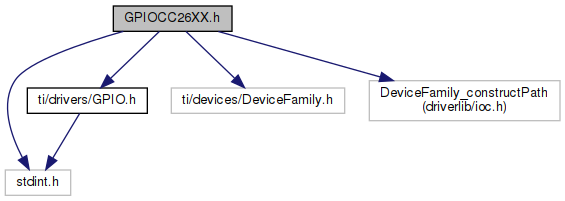
Go to the source code of this file.
Data Structures | |
| struct | GPIOCC26XX_Config |
| GPIO device specific driver configuration structure. More... | |
Macros | |
Device specific GPIO port/pin identifiers to be used within the board's GPIO_PinConfig table. | |
| #define | GPIOCC26XX_EMPTY_PIN |
| #define | GPIOCC26XX_DIO_00 |
| #define | GPIOCC26XX_DIO_01 |
| #define | GPIOCC26XX_DIO_02 |
| #define | GPIOCC26XX_DIO_03 |
| #define | GPIOCC26XX_DIO_04 |
| #define | GPIOCC26XX_DIO_05 |
| #define | GPIOCC26XX_DIO_06 |
| #define | GPIOCC26XX_DIO_07 |
| #define | GPIOCC26XX_DIO_08 |
| #define | GPIOCC26XX_DIO_09 |
| #define | GPIOCC26XX_DIO_10 |
| #define | GPIOCC26XX_DIO_11 |
| #define | GPIOCC26XX_DIO_12 |
| #define | GPIOCC26XX_DIO_13 |
| #define | GPIOCC26XX_DIO_14 |
| #define | GPIOCC26XX_DIO_15 |
| #define | GPIOCC26XX_DIO_16 |
| #define | GPIOCC26XX_DIO_17 |
| #define | GPIOCC26XX_DIO_18 |
| #define | GPIOCC26XX_DIO_19 |
| #define | GPIOCC26XX_DIO_20 |
| #define | GPIOCC26XX_DIO_21 |
| #define | GPIOCC26XX_DIO_22 |
| #define | GPIOCC26XX_DIO_23 |
| #define | GPIOCC26XX_DIO_24 |
| #define | GPIOCC26XX_DIO_25 |
| #define | GPIOCC26XX_DIO_26 |
| #define | GPIOCC26XX_DIO_27 |
| #define | GPIOCC26XX_DIO_28 |
| #define | GPIOCC26XX_DIO_29 |
| #define | GPIOCC26XX_DIO_30 |
| #define | GPIOCC26XX_DIO_31 |
Functions | |
| void | GPIOCC26xx_release (int index) |
| Un-oonfigure a GPIO pin. More... | |
| void GPIOCC26xx_release | ( | int | index | ) |
Un-oonfigure a GPIO pin.
Disables pin interrupt, clears callback, restores pin to default setting, removes pin from PIN object
| index | GPIO index |