7.1. HMI and 3D Out Of Box Demo - User Guide¶
7.1.1. Overview¶
The AM62x SK board has an Imagination Technologies GPU. Using this, a QT based Human-Machine Interface (HMI) Out of Box Demo has been set up such that the board launches a Control Panel which user can control using the connected Mouse and Keyboard. The HMI Demo also launches a 3D Demo and Matrix GUI.
All of the necessary equipment requirement and instructions are provided here.
7.1.2. Hardware Prerequisites¶
- TI AM62x SK
- PC (Windows or Linux, to use serial terminal console)
- HDMI Monitor (to view the Demo on Display)
- Keyboard & Mouse (to control the HMI & 3D Demo)
- SD card (minimum 16GB)
7.1.3. Launching and Using the HMI Demo¶
The HMI Demo launches on Linux startup. Follow the below instructions to use it.
- Connect the Display, mouse & keyboard and Power on the board. The HMI Demo will launch when the Device is fully booted.
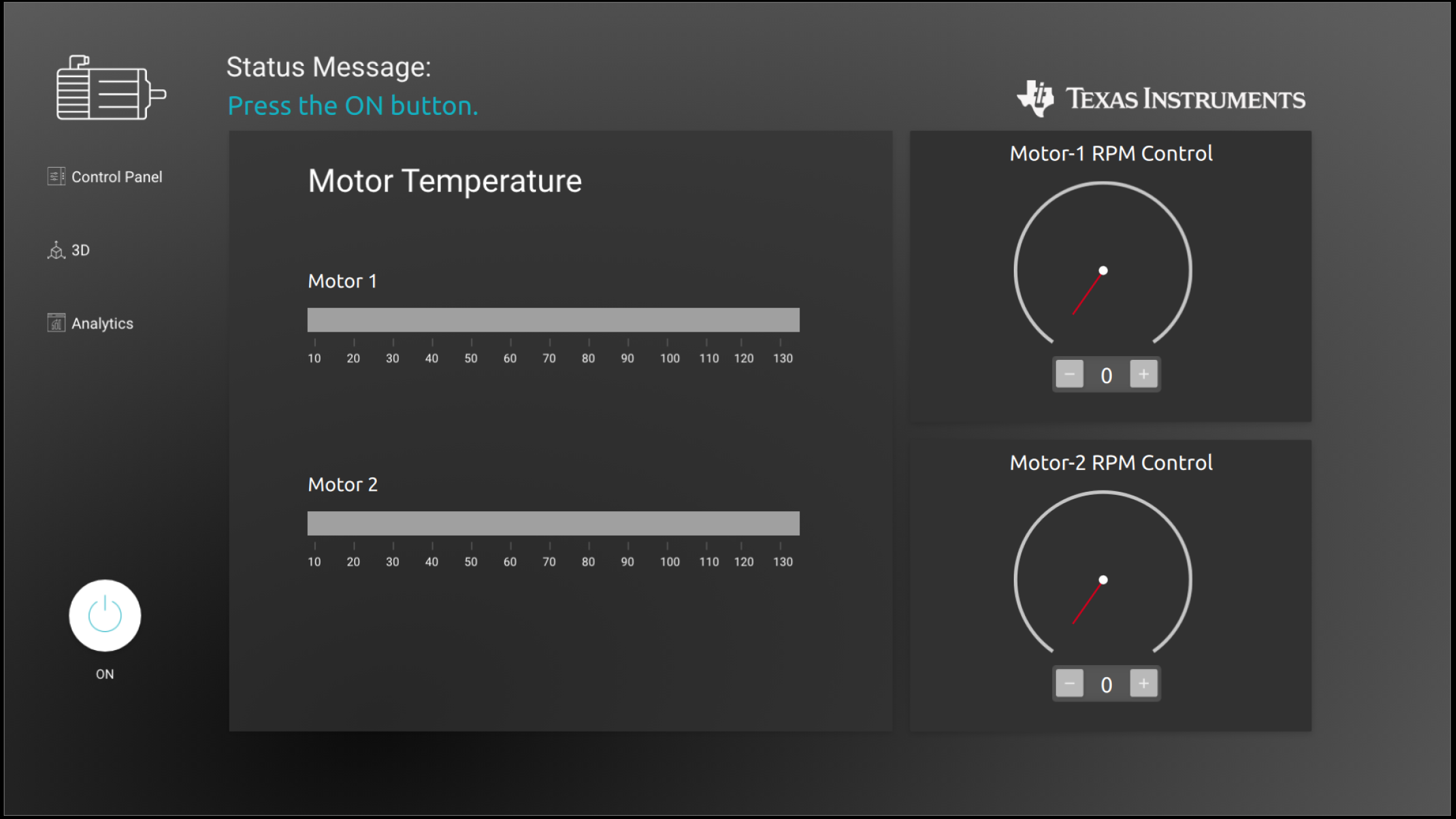
- Once started, Click on the ON/OFF button to start the Control Panel.
- Now you can use the + and - buttons of each motor to control the RPM.
- To go to the 3D Demo, click on the 3D button on the left panel.
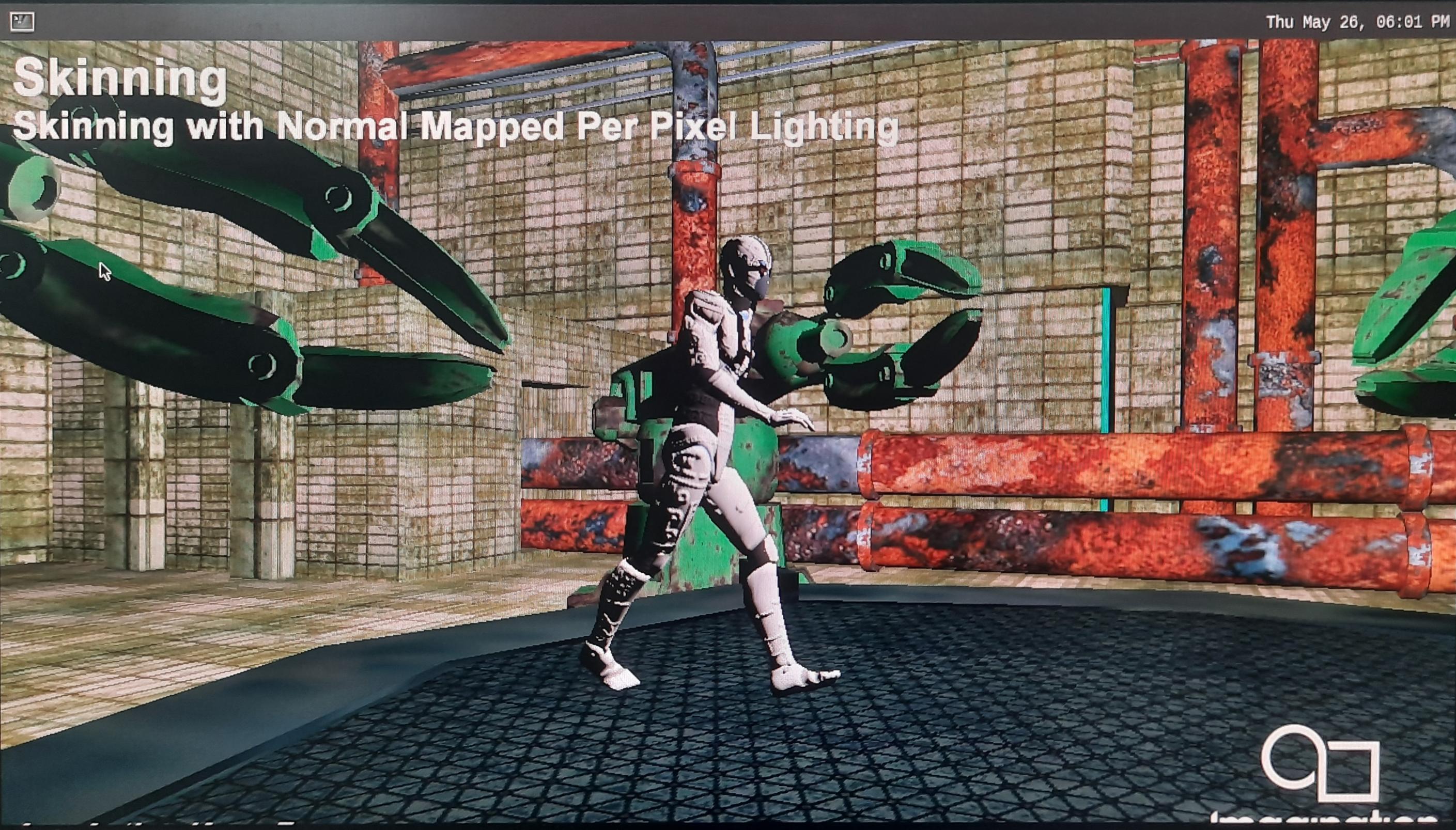
You can use mouse buttons or spacebar to pause the 3D Demo. And press ESC to go back to HMI Demo.
To Exit the HMI Demo and go to Matrix GUI, long press on ON/OFF Button. The HMI Demo closes after 3 seconds and launches Matrix-GUI.
To relaunch the HMI Demo, run
systemctl start hmi_demo
7.1.4. Launching the 3D Demo¶
To launch the 3D Demo without the HMI Demo, run
/etc/init.d/start_3d_demo.sh
To change the 3D Demo that launches with the script, update the DEMO_3D_APP_NAME variable in the script.
You can find the list of available 3D demos under /usr/bin/SGX/demos/Wayland/
OGLES2ChameleonMan OGLES2Coverflow OGLES2ExampleUI OGLES2FilmTV OGLES2MagicLantern OGLES2Navigation OpenGLESBinaryShaders OpenGLESSkinning
7.1.5. Launching the Matrix-GUI¶
To launch the Matrix-GUI without the HMI Demo, run
/etc/init.d/matrix-gui-2.0 start
To stop the Matrix-GUI, run
/etc/init.d/matrix-gui-2.0 stop
7.1.6. Building the HMI Demo¶
The HMI Demo is enabled by default in yocto for AM62x Linux and RT-Linux.
The source code is available at HMI Demo and can be recompiled with the following steps
To setup the environment, from the root of the SDK installation directory, source environment-setup script.
$ source linux-devkit/environment-setup
Go to the root of HMI Demo repository and run the following command to build the application.
$ qmake; make
Copy the compiled binary to /usr/bin directory of the device
$ scp hmi_demo root@<ip-addr-of-device>:/usr/bin/