Introduction
The HDSL firmware running on ICSS-PRU provides a defined well interface to execute the HDSL protocol. The HDSL diagnostic application described here interacts with the firmware interface.
HDSL diagnostic application does below,
- Configures pinmux, GPIO, ICSS clock to 225MHz,
- Initializes ICSS0-PRU1, ICSS0-IEP0 and IEP1(for SYNC mode support.Timesync router is used to latch the loopback.),
- Loads lookup table for encoding/decoding of Hiperface data
- Loads the initialization section of PRU firmware & executes it.
Firmware is split to three sections, initialization, datalink and transport. At startup, the application displays details about encoder and status. It then presents the user with menu options, based on the option selected, application communicates with HDSL interface and the result is presented to the user.
Features Supported
- PRU firmware source
- External pulse synchronization
- Safe position
- Supports upto 100m cable
- Communication status
- Register interface to be compatible with SICK HDSL FPGA IP Core. (except registers that have different functionality for read and write)
- Parameter channel communication (short message write)
SysConfig Features
- Note
- It is strongly recommend to use SysConfig where it is available instead of using direct SW API calls. This will help simplify the SW application and also catch common mistakes early in the development cycle.
SysConfig can be used to configure things mentioned below:
- Selecting the ICSSG0PRUx instance.(Tested on ICSSG0-PRU1)
- Configuring PINMUX.
Features Not Supported
In general, peripherals or features not mentioned as part of "Features Supported" section are not supported, including the below
- Fast position, speed
- Pipeline channel
- Short message read
- Safety
Important files and directory structure
| Folder/Files | Description |
| ${SDK_INSTALL_PATH}/examples/motor_control/hdsl_diagnostic |
| hdsl_diagnostic.c | Hdsl diagnostic application |
| hdsl_lut.c | Look up tables for HDSL. |
| ${SDK_INSTALL_PATH}/source/motor_control/position_sense/hdsl |
| firmware/ | Folder containing HDSL PRU firmware sources. |
Supported Combinations
| Parameter | Value |
| CPU + OS | r5fss0-0 freertos |
| ICSSG | ICSSG0 |
| PRU | PRU1 |
| Toolchain | ti-arm-clang |
| Board | am64x-evm |
| Example folder | examples/motorcontrol/hdsl_example |
Steps to Run the Example
Hardware Prerequisites
Other than the basic EVM setup mentioned in EVM Setup, below additional HW is required to run this demo
- HDSL encoder
- Below are two options to connect encoder to AM64x EVM.
- Option 1
- TIDA-00179 Universal Digital Interface to Absolute Position Encoders, https://www.ti.com/tool/TIDA-00179
- TIDEP-01015 3 Axis board
- Interface card connecting EVM and TIDEP-01015 3 Axis board
- Connect the Hiperface DSL encoder to HDSL+/-(Pin number 6 and 7) signals available on header J7 or Sub-D15 connector of the "Universal Digital Interface to Absolute Position Encoders" board.
- Option 2
- HDSL AM64xE1 Transceiver. If application is using this card, define the macro HDSL_AM64xE1_TRANSCEIVER in the CCS project/make file.
- Connect the Hiperface DSL encoder to J10.
- HDSL AM64xE1 Transceiver supports two channels that can be used to support HDSL safety, multi axis servo drives.
- Schematics are shared in the MCU+SDK package. For more design details of the transceiver card, please contact TI via E2E/FAE.
- HDSL Transceiver Card Schematics document.
Hardware Setup(Using TIDA-00179, TIDEP-01015 and Interface board)

Hardware Setup
Hardware Setup(Using HDSL AM64xE1 Transceiver)

Hardware Setup
Build, load and run
- When using CCS projects to build, import the CCS project and build it using the CCS project menu (see Using SDK with CCS Projects).
- When using makefiles to build, note the required combination and build using make command (see Using SDK with Makefiles)
- Launch a CCS debug session and run the executable, see CCS Launch, Load and Run
- Refer to UART terminal for user interface menu options.
Sample Output
Shown below is a sample output when the application is run:
- Freerun mode,

HDSL Diagnostic in freerun mode
- Sync Mode,
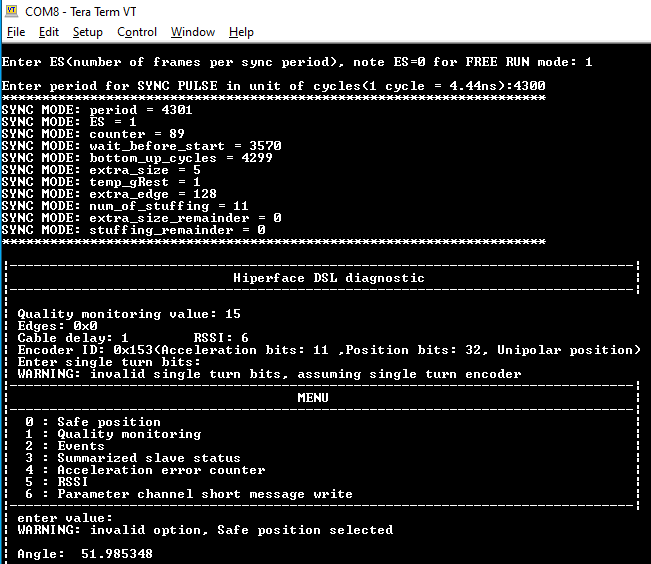
HDSL Diagnostic in SYNC mode


 1.8.20
1.8.20