|
AM243x MCU+ SDK
08.01.00
|


|
|
AM243x MCU+ SDK
08.01.00
|
|
The HDSL firmware running on ICSS-PRU provides a defined well interface to execute the HDSL protocol. The HDSL diagnostic application described here interacts with the firmware interface.
HDSL diagnostic application does below,
Firmware is split to three sections, initialization, datalink and transport. At startup, the application displays details about encoder and status. It then presents the user with menu options, based on the option selected, application communicates with HDSL interface and the result is presented to the user.
SysConfig can be used to configure things mentioned below:
In general, peripherals or features not mentioned as part of "Features Supported" section are not supported, including the below
| Folder/Files | Description |
|---|---|
| ${SDK_INSTALL_PATH}/examples/motor_control/hdsl_diagnostic | |
| hdsl_diagnostic.c | Hdsl diagnostic application |
| hdsl_lut.c | Look up tables for HDSL. |
| ${SDK_INSTALL_PATH}/source/motor_control/position_sense/hdsl | |
| firmware/ | Folder containing HDSL PRU firmware sources. |
| Parameter | Value |
|---|---|
| CPU + OS | r5fss0-0 freertos |
| Toolchain | ti-arm-clang |
| Board | am243x-evm |
| Example folder | examples/motorcontrol/hdsl_example |
Other than the basic EVM setup mentioned in EVM Setup, below additional HW is required to run this demo
Connect the Hiperface DSL encoder to HDSL+/-(Pin number 6 and 7) signals available on header J7 or Sub-D15 connector of the "Universal Digital Interface to Absolute Position Encoders" board.

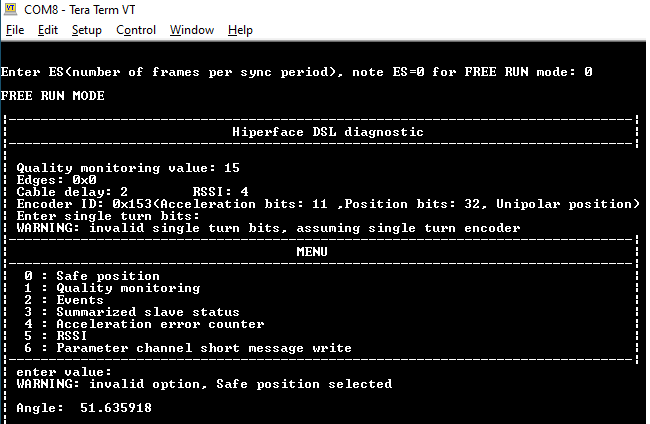
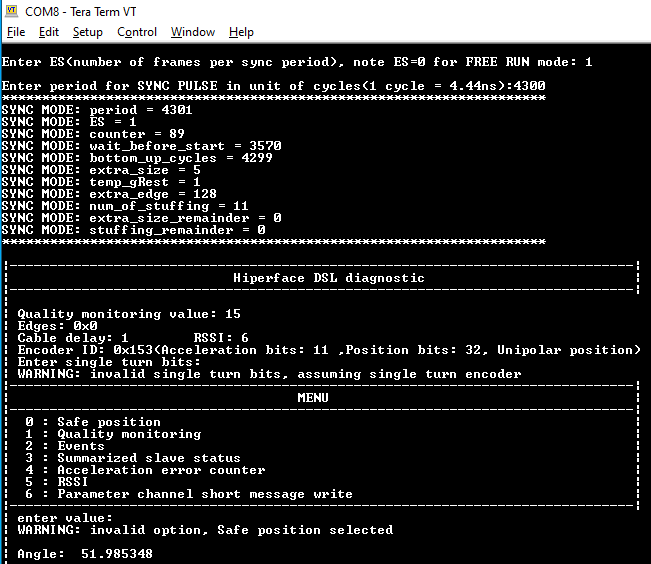
Shown below is a sample output when the application is run:
 1.8.20
1.8.20