RealSense Camera ROS Node
Intel RealSense camera, D435i, is widely used in many Robotics applications that need depth information. This document describes how to install and run Intel RealSense camera (D435i) ROS node in the ROS1 Docker container on J7. It consists of two steps, 1) Install RealSense SDK from source, 2) Clone and RealSense camera ROS node.
Install RealSense SDK from Source
Launch the Docker image. For setting up the ROS1 environment on J7, please follow Docker Setup for ROS 1.
root@tda4vm-sk:~/j7ros_home# ./docker_run_ros1.sh
Before launching
docker_run_ros1.sh, remove ‘–rm’ flag indocker runcommand in it since we need to commit the changes after installing RealSense SDK.Clone RealSense SDK.
root@j7-docker:~/j7ros_home/ros_ws$ export REALSENSE_SOURCE_DIR=$HOME/j7ros_home/librealsense root@j7-docker:~/j7ros_home/ros_ws$ sudo apt-get update root@j7-docker:~/j7ros_home/ros_ws$ sudo apt-get install guvcview git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev root@j7-docker:~/j7ros_home/ros_ws$ sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev root@j7-docker:~/j7ros_home/ros_ws$ git clone https://github.com/IntelRealSense/librealsense.git $REALSENSE_SOURCE_DIR root@j7-docker:~/j7ros_home/ros_ws$ mkdir $REALSENSE_SOURCE_DIR/build root@j7-docker:~/j7ros_home/ros_ws$ cd $REALSENSE_SOURCE_DIR/build
Build and Install RealSense SDK.
# Build SDK root@j7-docker:~/j7ros_home/librealsense/build$ export REALSENSE_INSTALL_PREFIX=/opt/realsense root@j7-docker:~/j7ros_home/librealsense/build$ sudo mkdir -p $REALSENSE_INSTALL_PREFIX root@j7-docker:~/j7ros_home/librealsense/build$ sudo chown $USER:$USER -R $REALSENSE_INSTALL_PREFIX root@j7-docker:~/j7ros_home/librealsense/build$ cmake ../ -DFORCE_RSUSB_BACKEND=true -DBUILD_PYTHON_BINDINGS=false -DCMAKE_BUILD_TYPE=release -DBUILD_EXAMPLES=false -DBUILD_GRAPHICAL_EXAMPLES=false -DCMAKE_INSTALL_PREFIX=$REALSENSE_INSTALL_PREFIX # Install SDK - It may take up to a couple of hours root@j7-docker:~/j7ros_home/librealsense/build$ make install # Make cmake config available root@j7-docker:~/j7ros_home/librealsense/build$ echo "export realsense2_DIR=/opt/realsense/lib/cmake/realsense2" >> ~/.bashrc root@j7-docker:~/j7ros_home/librealsense/build$ source ~/.bashrc # Package needed to compile realsense ROS package root@j7-docker:~/j7ros_home/librealsense/build$ sudo apt install ros-noetic-ddynamic-reconfigure
Exit docker and update an image from the container’s changes.
# Check container_id root@tda4vm-sk:~/j7ros_home# docker ps --all # Update Docker image root@tda4vm-sk:~/j7ros_home# docker commit container_id j7-ros-noetic:8.4
Run RealSense ROS Node
Launch the Docker image.
root@tda4vm-sk:~/j7ros_home# ./docker_run_ros1.sh
Clone Intel RealSense ROS package.
root@j7-docker:~/j7ros_home/ros_ws$ mkdir src root@j7-docker:~/j7ros_home/ros_ws$ git clone https://github.com/IntelRealSense/realsense-ros.git src/realsense-ros root@j7-docker:~/j7ros_home/ros_ws$ catkin_make --source src/realsense-ros
Launch RealSense camera.
Connect a RealSense camera to the SK-board. Then launch the RealSense camera as follows:
root@j7-docker:~/j7ros_home/ros_ws$ roslaunch realsense2_camera rs_camera.launch
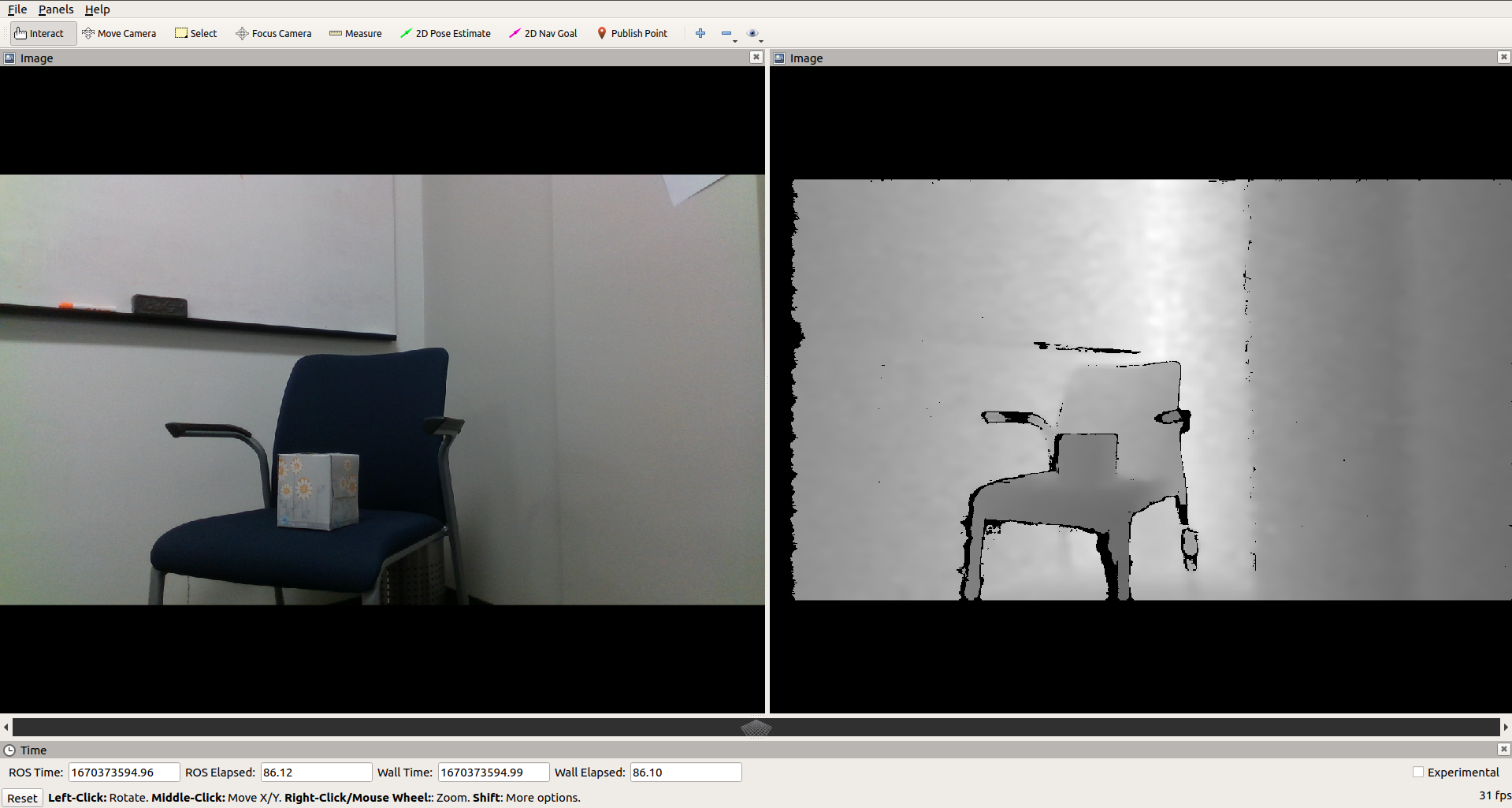
We can visualize the RealSense camera outputs using RViz on PC as shown in Figure 1.