AprilTag ROS Node
AprilTag is a robust visual fiducial system, which is used in various applications such as Robotics, localization, SLAM, etc. For more information on AprilTag, is is recommended to visit https://april.eecs.umich.edu/software/apriltag and http://wiki.ros.org/apriltag_ros.
This document describes how to install and run AprilTag ROS node in the ROS1 Docker container. It consists of two steps, 1) Install AprilTag library from source, 2) Run AprilTag ROS node with monochrome camera.
Install AprilTag Library
Launch the Docker image. For setting up the ROS1 environment on J7, please follow Docker Setup for ROS 1.
root@tda4vm-sk:~/j7ros_home# ./docker_run_ros1.sh
Before launching
docker_run_ros1.sh, remove ‘–rm’ flag indocker runcommand in it since we need to commit the changes after installing AprilTag library.Clone AprilTag.
root@j7-docker:~/j7ros_home/ros_ws$ export APRILTAG_SOURCE_DIR=$HOME/j7ros_home/apriltag root@j7-docker:~/j7ros_home/ros_ws$ git clone https://github.com/AprilRobotics/apriltag.git $APRILTAG_SOURCE_DIR
Build and Install AprilTag library.
root@j7-docker:~/j7ros_home/ros_ws$ cd $APRILTAG_SOURCE_DIR root@j7-docker:~/j7ros_home/ros_ws$ cmake -B build -DCMAKE_BUILD_TYPE=Release root@j7-docker:~/j7ros_home/ros_ws$ cmake --build build --target install
Exit docker and update an image from the container’s changes.
# Check container_id root@tda4vm-sk:~/j7ros_home# docker ps --all # Update Docker image root@tda4vm-sk:~/j7ros_home# docker commit container_id j7-ros-noetic:8.4
Run April ROS Node
Launch the Docker image.
root@tda4vm-sk:~/j7ros_home# ./docker_run_ros1.sh
Clone and build AprilTag ROS package.
root@j7-docker:~/j7ros_home/ros_ws$ mkdir src root@j7-docker:~/j7ros_home/ros_ws$ git clone git clone https://github.com/AprilRobotics/apriltag_ros.git src/apriltag_ros root@j7-docker:~/j7ros_home/ros_ws$ catkin_make --source src/apriltag_ros
Launch AprilTag ROS node.
root@j7-docker:~/j7ros_home/ros_ws$ source devel/setup.bash root@j7-docker:~/j7ros_home/ros_ws$ roslaunch apriltag_ros continuous_detection.launch
Note that
tags.yamlandsettings.yamlcan be configurable for tag definition and tag detection algorithm, respectively. A various types of AprilTags can be downloaded from https://github.com/AprilRobotics/apriltag-imgs.Launch USB camera.
Connect a USB camera to the SK board. Logitech C920 camera is used for test. Since AprilTag ROS node does not support YUV422 format, we update the following line of
mono_capture.launchunder/opt/robotics_sdk/ros1/drivers/mono_capture/launch:<arg name="encoding" default="bgr8"/>
Then launch the camera as follows:
root@j7-docker:~/j7ros_home/ros_ws$ source devel/setup.bash root@j7-docker:~/j7ros_home/ros_ws$ roslaunch mono_capture mono_capture.launch
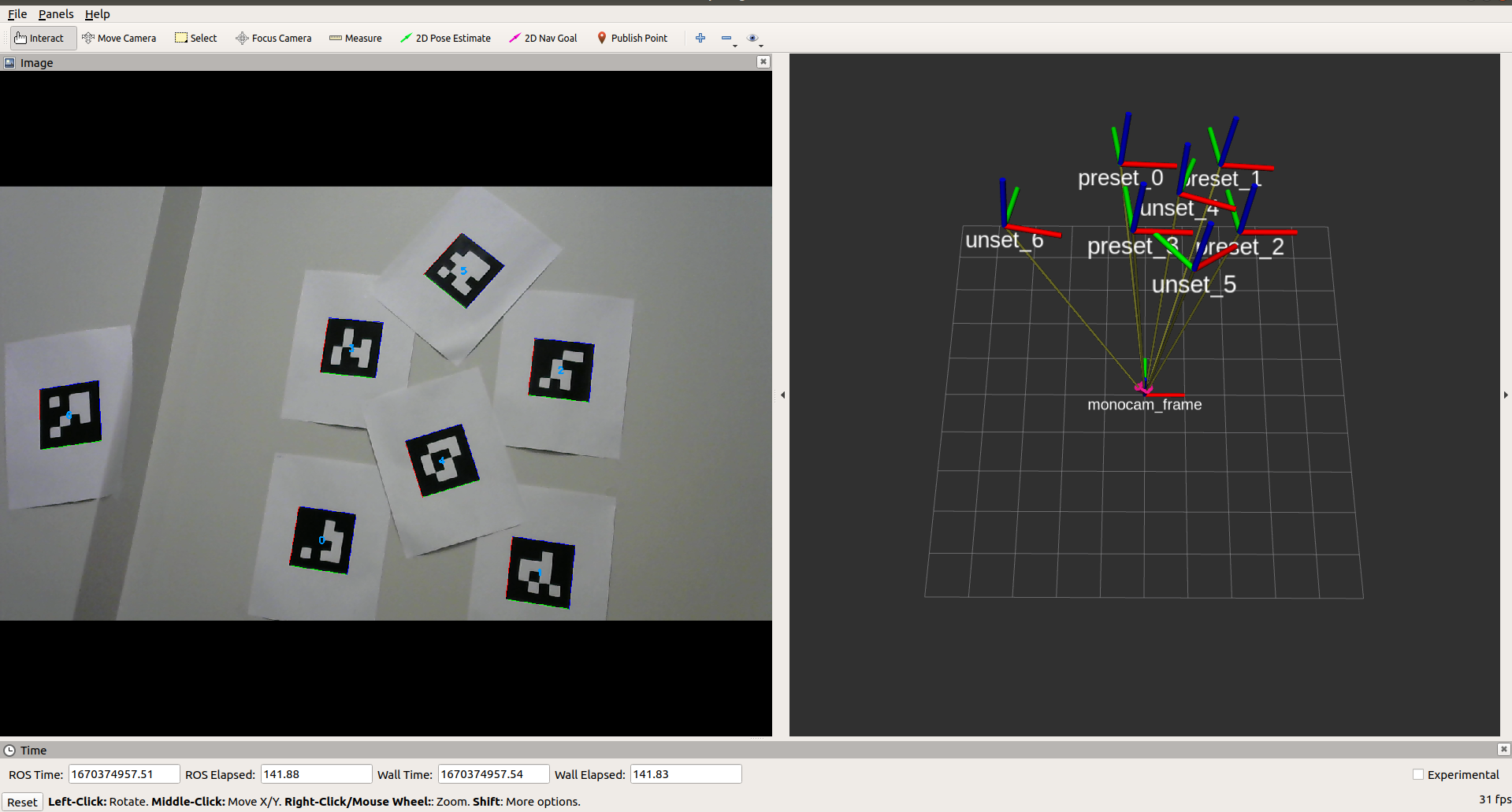
As shown in Figure 1, we can visualize the AprilTag detection outputs along with their poses with respect to the camera using RViz on PC.