|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
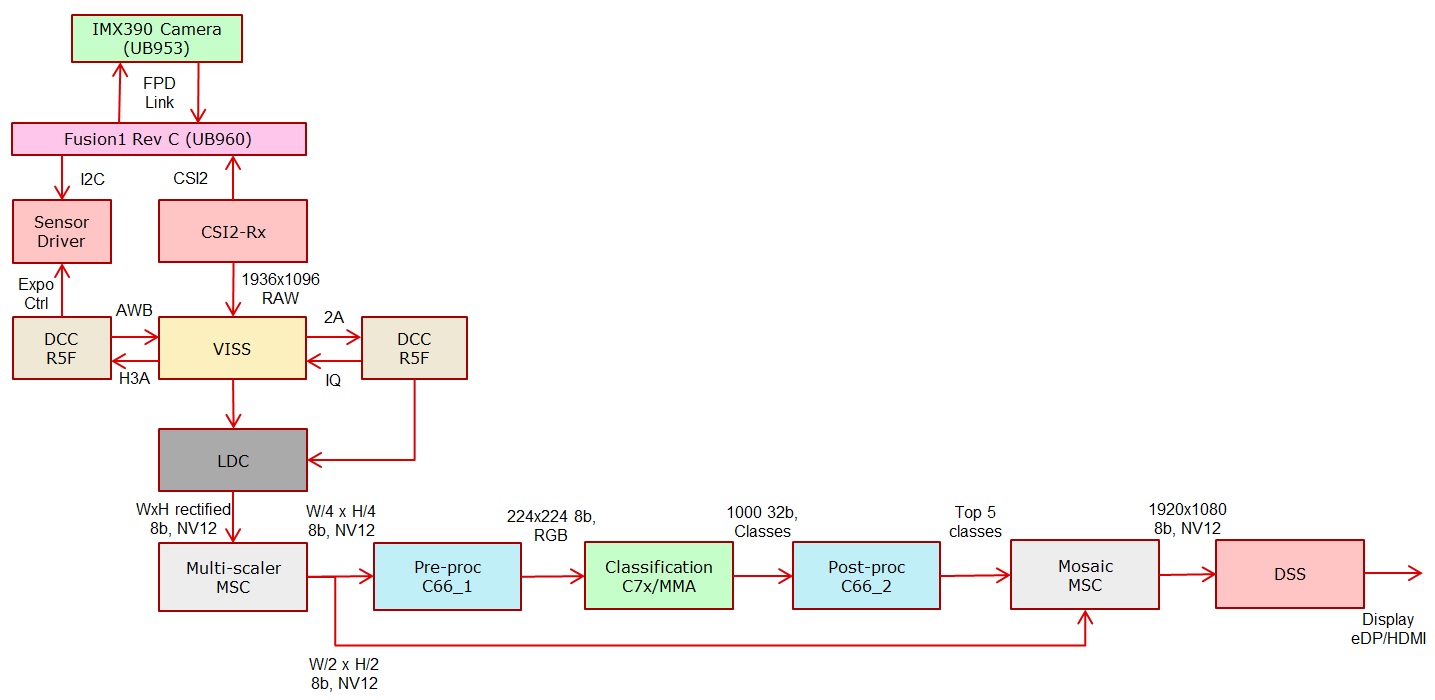
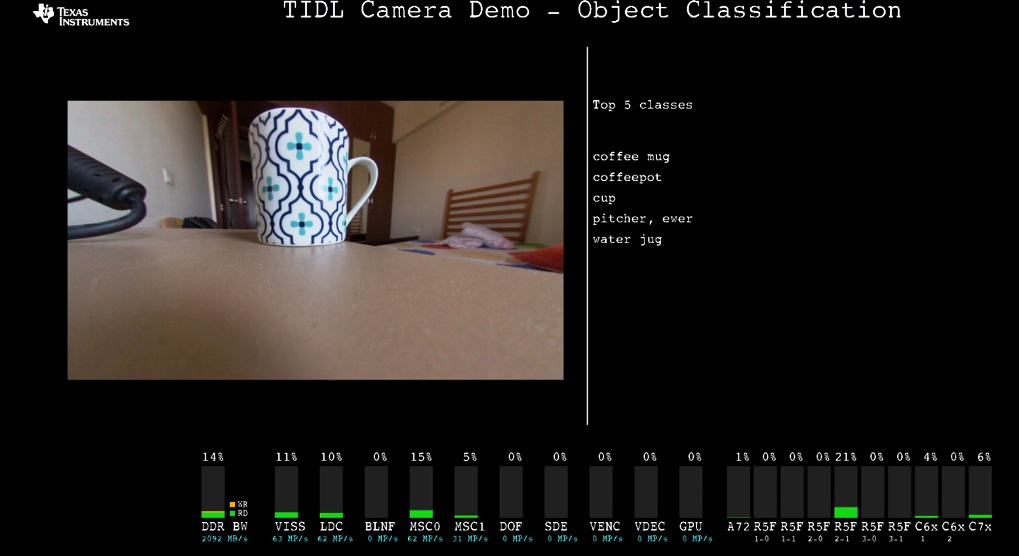
This application shows how to integrate a camera to a TIDL Node for image classification. The demo is designed to work with 2MP sensor and validated ONLY for D3's IMX390 2MP camera. The network chosen is MobileNet_v1. Raw pixels from sensor is captured via CSI2Rx and sent to VISS for image processing. The resulting image is written in NV12 format which is then sent to LDC for fish-eye rectification. The rectified image is scaled into 1/2 and 1/4 resolutions. The 1/2 resolution is sent to display and 1/4 resolution is center cropped and sent to TIDL node for inference.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | NO | YES | YES | J721e |
Shown below is a example input and its corresponding output
 1.8.15
1.8.15