|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
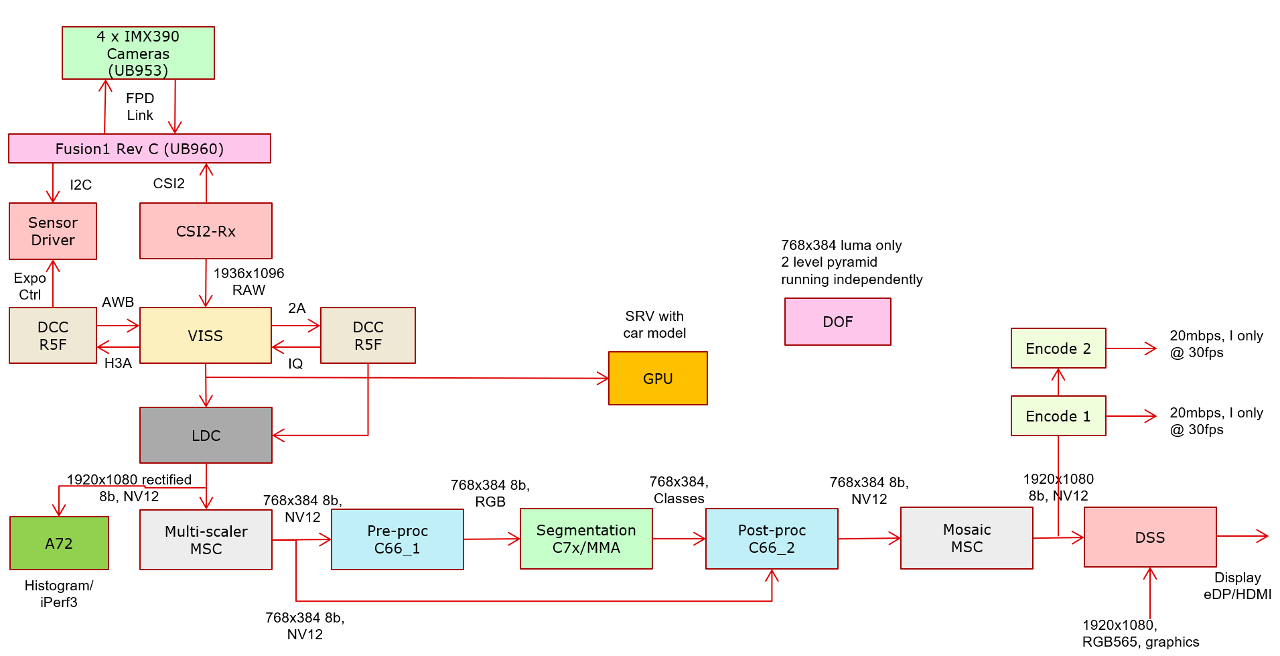
This application demonstrates a typical auto valet parking use-case with realtime capture of four 2MP cameras @30fps. Live camera inputs are fed to VISS to perform RAW to NV12 conversion with required Auto Exposure and Auto White-balance (AEWB) correction algorithm running on Main R5F. This fish-eye image is sent to two pipelines one is a surround-view pipeline which uses the GPU to perform 3D surround-view and another is an analytics pipeline which uses TIDL to perform semantic segmentation for on all the 4 cameras. The VISS output is sent to LDC to perform fish-eye distortion and the to multi-scalar to reduce the effective resolution to 768x384 as required by the DL-network. The image is pre-processed on C66x_1 DSP and provided to the TIDL library running on C71x DSP for inference. The output of each of the 4 cameras is then post-processed on C66x_2 DSP where the chroma channels are color keyed based on the predicted classes per pixel. All the 4 post-processed outputs are then assembled on a 1920x1080 plane using SW mosaic (using MSC) and then submitted to 2MP display clocked @60fps. The same output is also sent to two instances of H.264 encoder doing I frame only GOP. On the A72 a image histogram of LDC output for all the four channels. The purpose of putting together this use-case is to serve as a reference example and also to study the effects of system traffic and DDR loading.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | NO | YES | YES | J721e |
As this application uses realtime camera inputs, build using host-emulation is not supported.
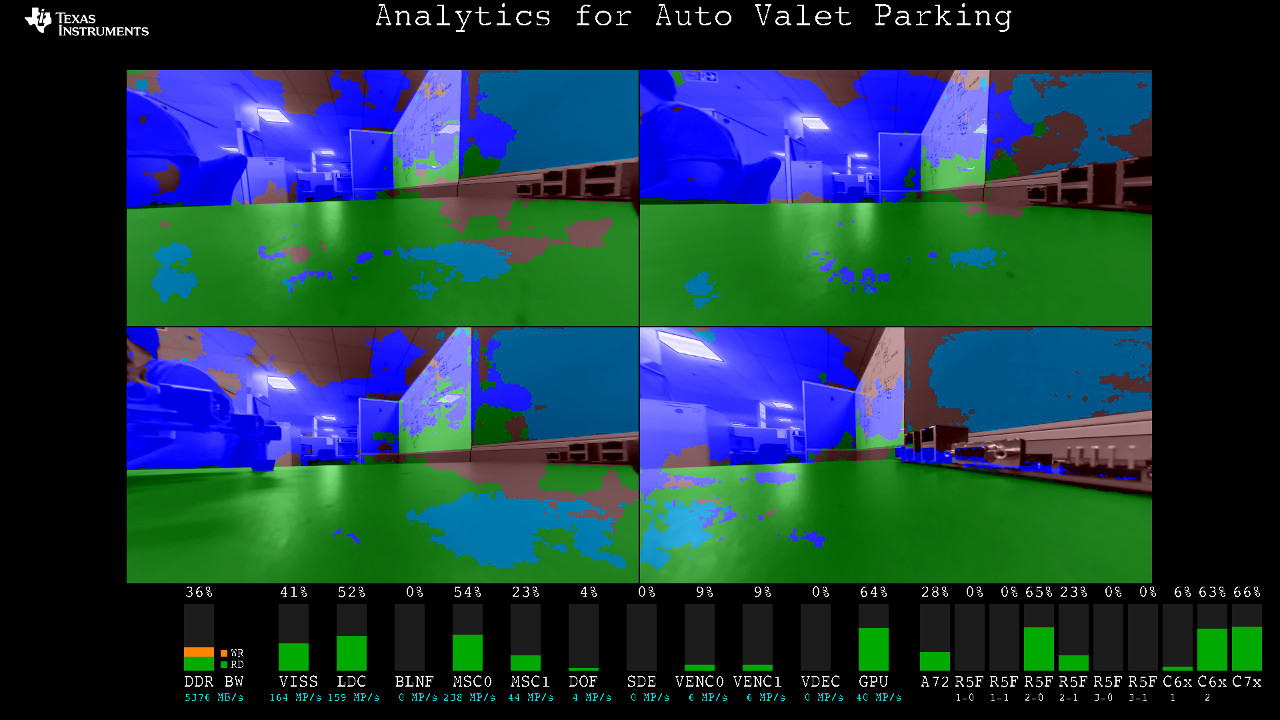
Shown below is a example of 4 live cameras running semantic segmentation. 3D-surround view output is not displayed. Encoded bit-streams are also not written to media.
The GPU output is stored in memory and not sent to display
 1.8.15
1.8.15