|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
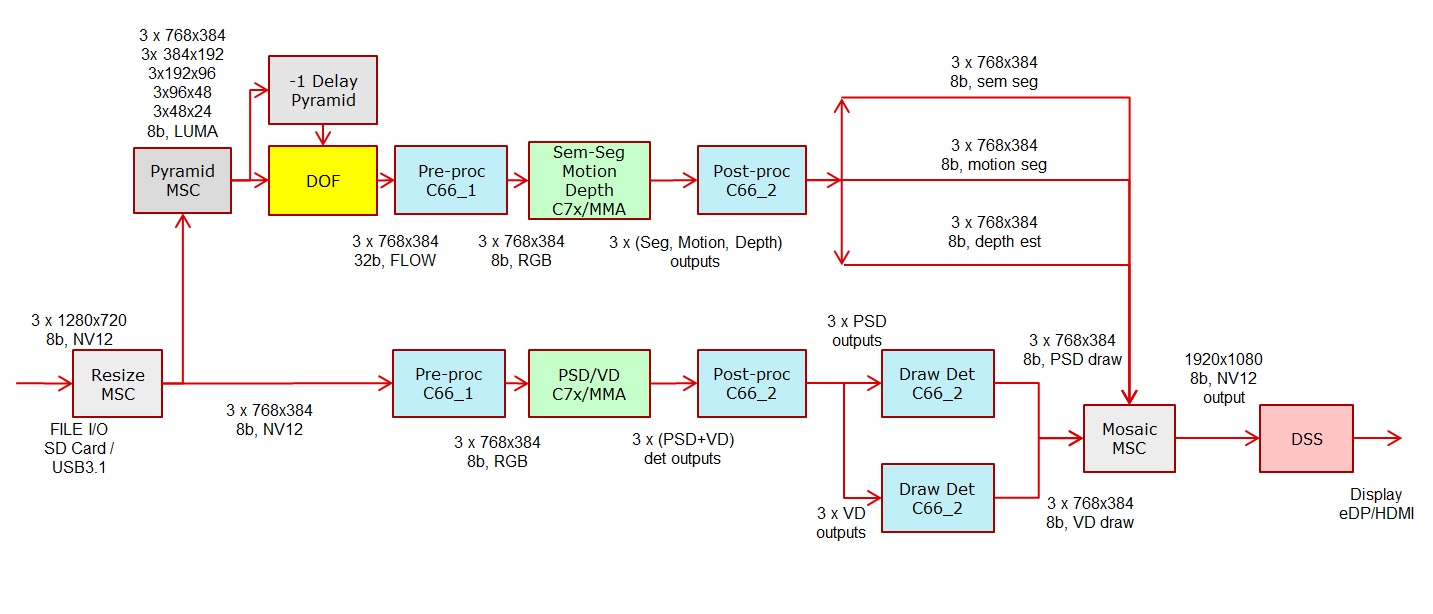
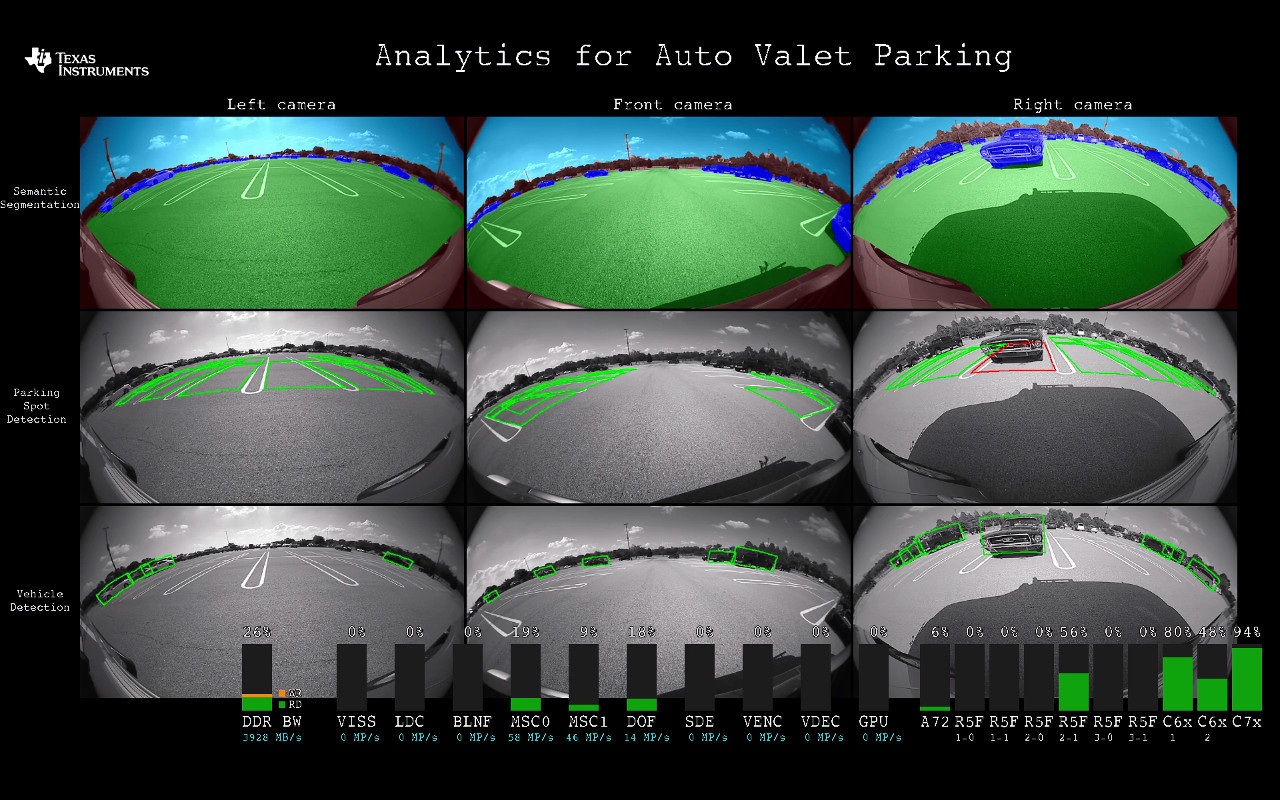
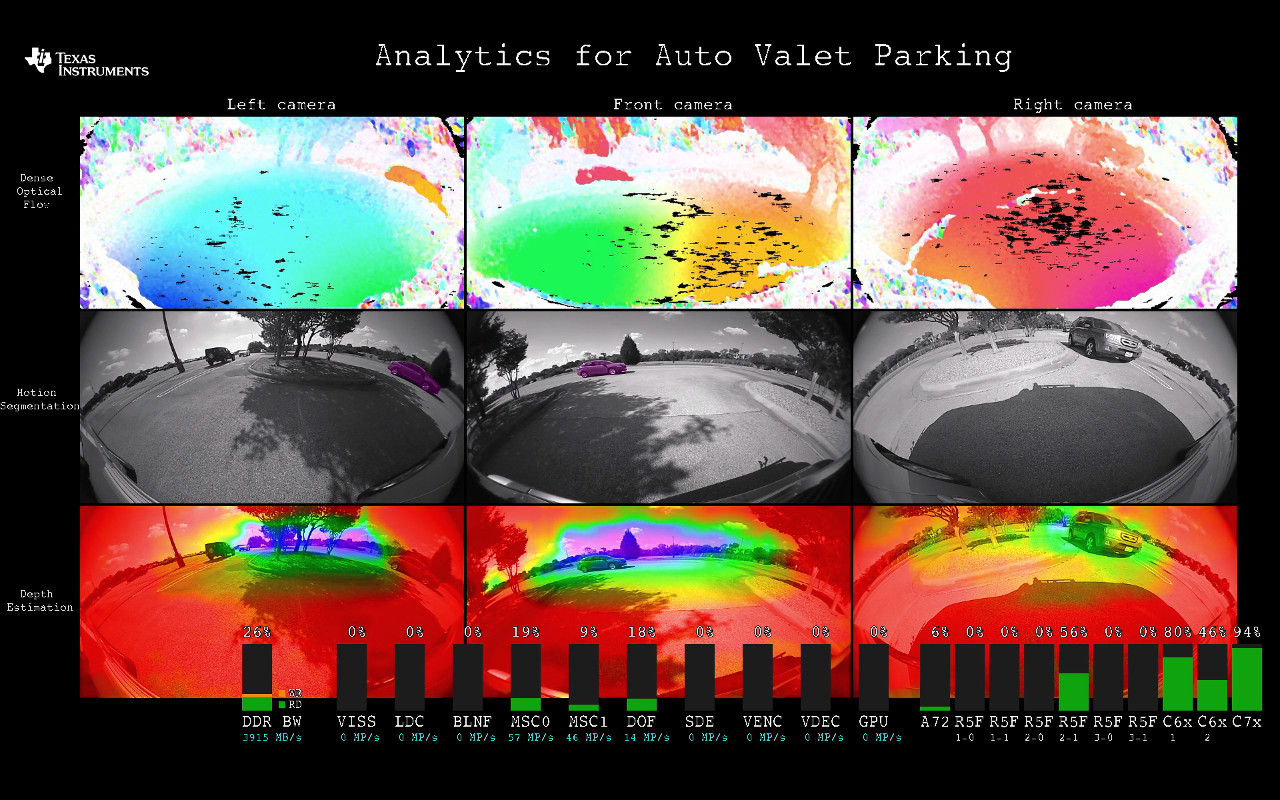
This application shows a demo of auto valet parking application which runs 5 deep learning algorithms such as parking spot detection, vehicle detection, semantic segmentation, motion segmentation and depth estimation on multiple input channels such as front, right and left cameras. The demo takes as input a sequence of nv12 images of resolution 1280x720 pixels coming from different input channels. The input is resized using a multi-scalar hardware (MSC) to 768x384 resolution which is provided to a multi-category object-detection network for doing parking spot detection and vehicle detection. The same resized input is provided provided to a multi-task network which does semantic segmentation, motion segmentation and depth estimation. The multi-task network also takes in Dense Optical Flow (DOF) output to help in motion segmentation task. The inputs are pre-processed on C66 DSP before providing to TIDL running on C7x DSP. The output of TIDL is then post-processed on another C66 DSP which draws rectangles around objects and blends semantic segmentation output. User can select a sub-set of outputs for display which is rendered using DSS driver.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | YES | YES | YES | J721e |
Shown below is a example input and its corresponding output
 1.8.15
1.8.15