|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
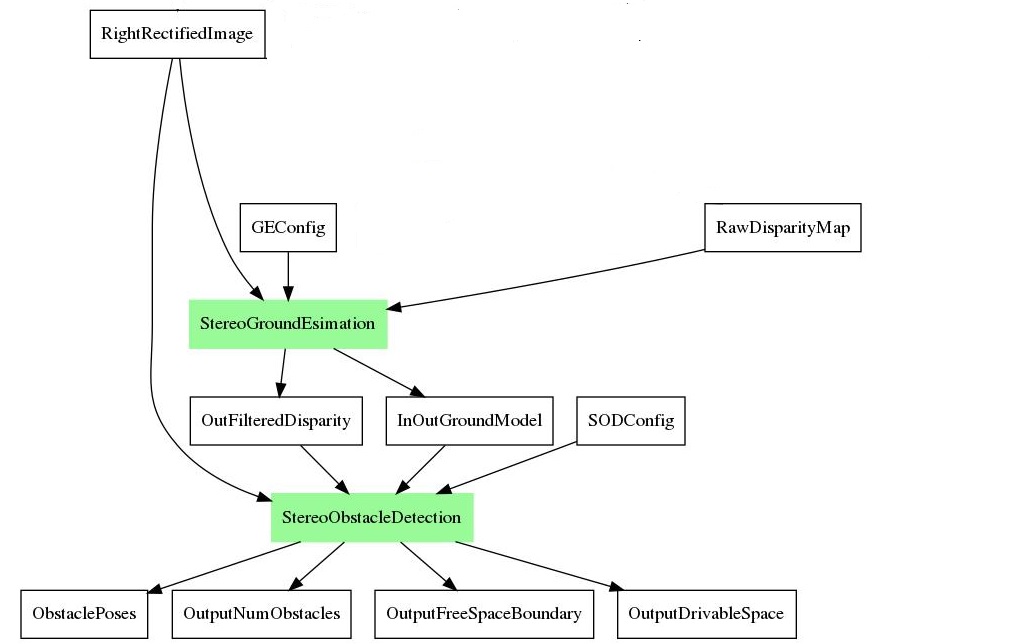
This applib provides a suite of functions to estimate ground plane, detect obstacles and freespace from the disparity map. The applib first estmates ground plane from the input disparity map. Then, it detects either obstacles and freespace using the estimated ground plane model and the disparity map. For detected objects, it produces bounding boxes around them with distances from cameras. For free space, it produces maximum drivable distance in front of vehicle.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
Shown below is data flows for obstacle / free space detection
 1.8.15
1.8.15