|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
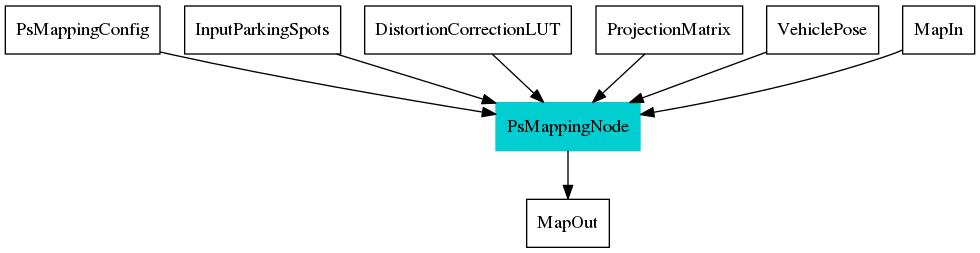
This applib provides a suite of functions to map free and occupied parking spots detected by Parking Spot Detection Application on ground. The inputs to the applib are mapping configuration, detected parking spot positions, lens distortion model, a projection matrix from an image plane to ground plane, ego-vehicle pose and an input map with already mapped parking spots on ground. The input map is updated by the applib whenever there is a new parking spot detected. This applib is used by Valet Parking Application.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
 1.8.15
1.8.15