|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
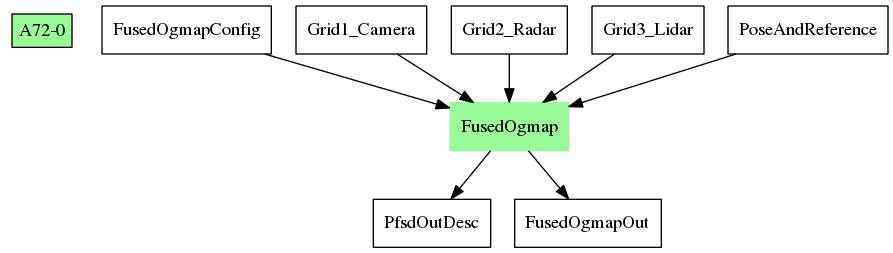
This applib consumes three input occupancy grids to produce a fused map indicating free space and parking free space around the vehicle. The cell-wise fusion logic is programable. In addition to the input maps, INS (Inertial Navigation System) data of the vehicle is required as input to determine the location of the vehicle in the mapping process. In addition to the fusion node operation, the applib also determines large free space in the current map, and searches for free space resembling a parking gap.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | N0 | YES | NO | J721e |
 1.8.15
1.8.15