|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
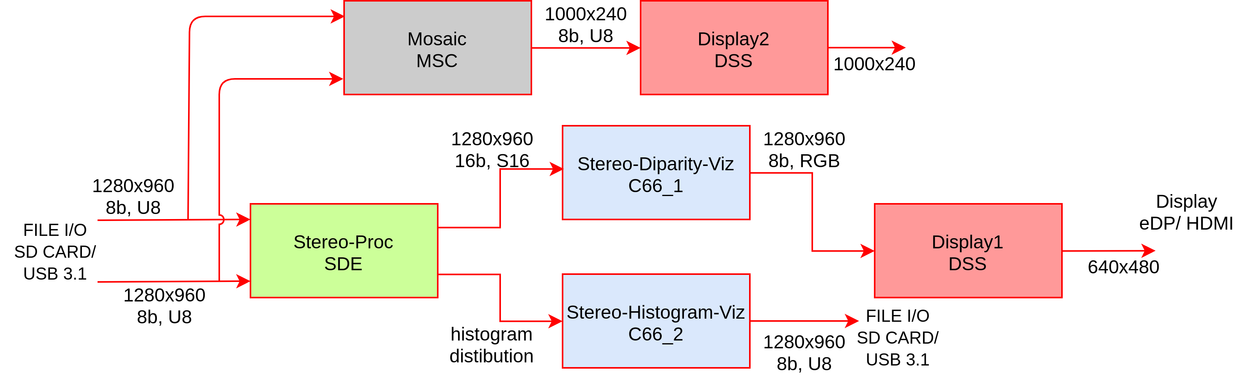
This application shows a demo of the TI Stereo Disparity Engine (SDE) hardware accelerator (HWA). The demo takes as input a sequence of input 8b gray scale left+right pair images in .png file format. Each pair of frames is run through Stereo Disparity OpenVX node. The stereo disparity map computed by SDE node are mapped based on a color palatte and output to files in .png format.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | YES | YES | YES | J721e |
Shown below is a example input and its corresponding output

Left Input | 
Right Input | 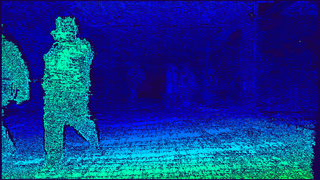
Output Stereo Disparity Map | 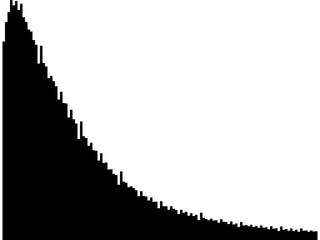
Output Disparity Histogram Map |
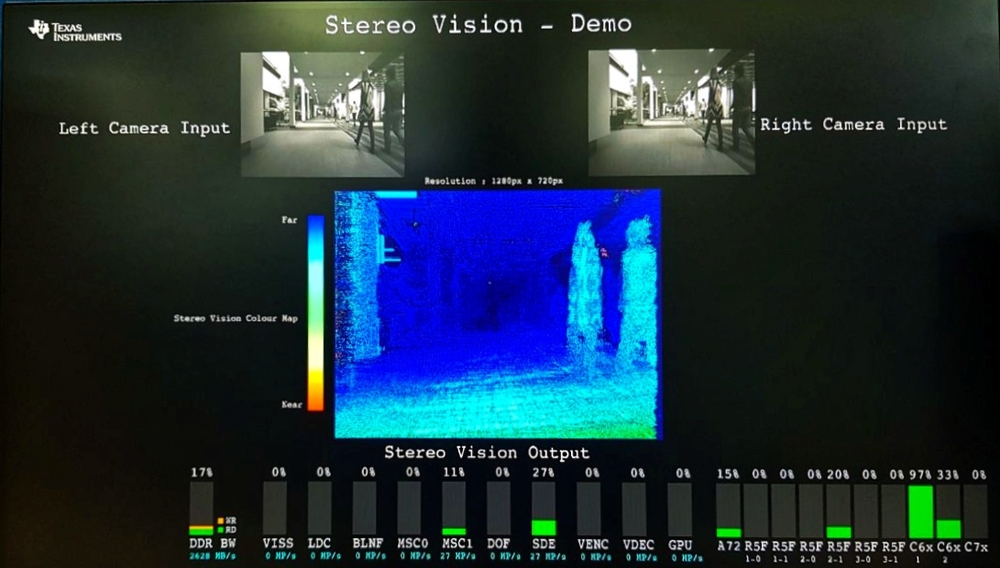
Shown below is a sample display on J721e EVM
 1.8.15
1.8.15