Running Simple demos¶
This chapter describes how to run Python and C++ demo applications in edge_ai_apps with live camera and display.
Note
Please note that the Python demos are useful for quick prototyping while C++ demos are similar by design but tuned for performance.
Running Python based demo applications¶
Python based demos are simple executable scripts written for image classification, object detection and semantic segmentation. Demos are configured using a YAML file. Details on configuration file parameters can be found in Demo Configuration file
Sample configuration files for out of the box demos can be found in
edge_ai_apps/configs this folder also contains a template config file
which has brief info on each configurable parameter edge_ai_apps/configs/app_config_template.yaml
Here is how a Python based image classification demo can be run,
root@tda4vm-sk:/opt/edge_ai_apps/apps_python# ./app_edgeai.py ../configs/image_classification.yaml
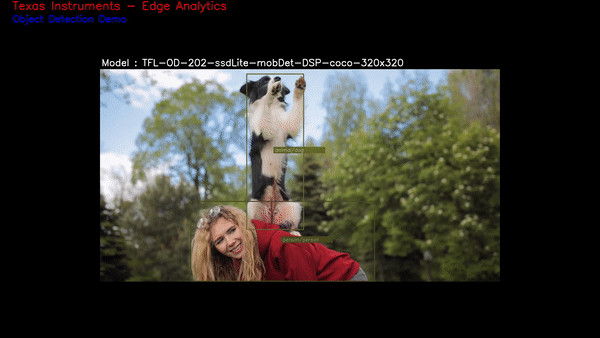
The demo captures the input frames from connected USB camera and passes through pre-processing, inference and post-processing before sent to display. Sample output for image classification and object detection demos are as below,
|
|

To exit the demo press Ctrl+C.
Running C++ based demo applications¶
C++ apps are cross compiled while packaging, they can be directly tested as given below
root@tda4vm-sk:/opt/edge_ai_apps/apps_cpp# ./bin/Release/app_edgeai ../configs/image_classification.yaml
To exit the demo press Ctrl+C.
C++ apps can be modified and built on the target as well using below steps
root@tda4vm-sk:/opt/edge_ai_apps/apps_cpp# rm -rf build bin lib
root@tda4vm-sk:/opt/edge_ai_apps/apps_cpp# mkdir build
root@tda4vm-sk:/opt/edge_ai_apps/apps_cpp# cd build
root@tda4vm-sk:/opt/edge_ai_apps/apps_cpp/build# cmake ..
root@tda4vm-sk:/opt/edge_ai_apps/apps_cpp/build# make -j2
Note
Both Python and C++ applications are similar by construction and can accept the same config file and command line arguments
Note
The C++ apps built on Yocto Linux may not run in Docker as there could be a mismatch in Glib and other related tools. So its highly recommended to rebuild the C++ apps within the Docker environment. setup_script.sh can be run to rebuild and install all components when switching from docker to yocto and vice versa
List of Deep Learning Based Demos supported OOB¶
Image Classification: Detects top 5 most approximate classes in the Imagenet dataset for the given input frame
Object Detection: Detects and draws bounding boxes around the objects, Also classifies the objects to one of the classes in coco dataset
Semantic Segmentation: Classifies each pixel into calss in ade20k dataset
Human Pose Estimation: Detects the posture of all the persons in the frame and draws a skeleton approximating the pose
Face Detection: Detects the face and draws bounding box around the face